Week6 Note
Lecture 7: Synchronization(同步化)
Synchronization of threads/processes

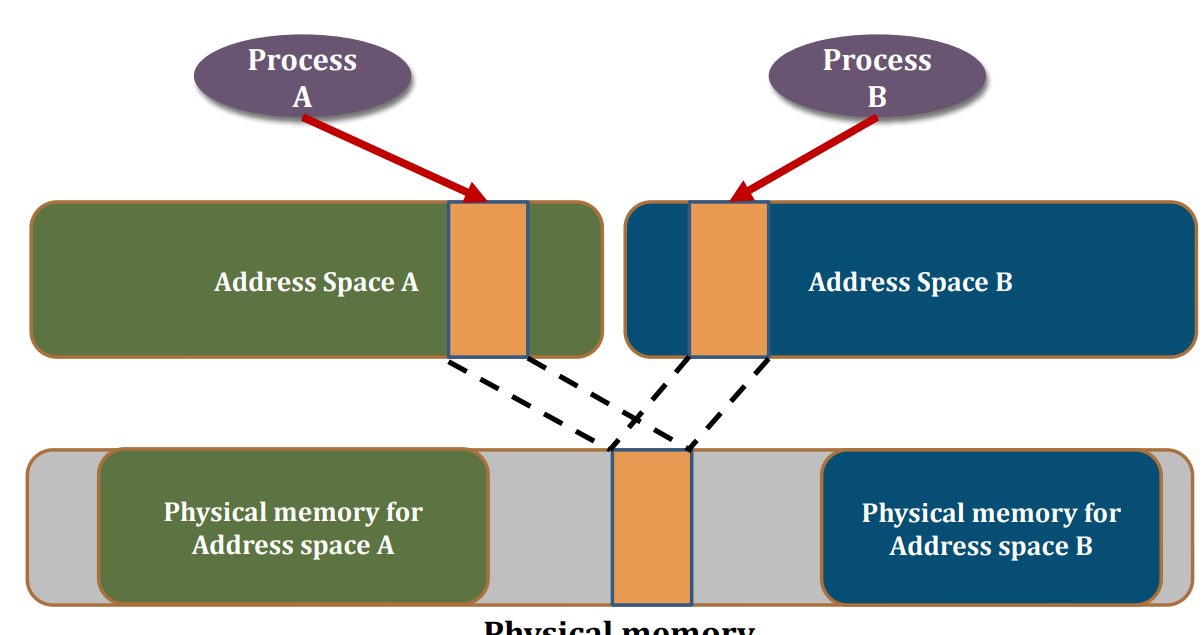
Shared memory between processes
Race Condition: Understanding the problem
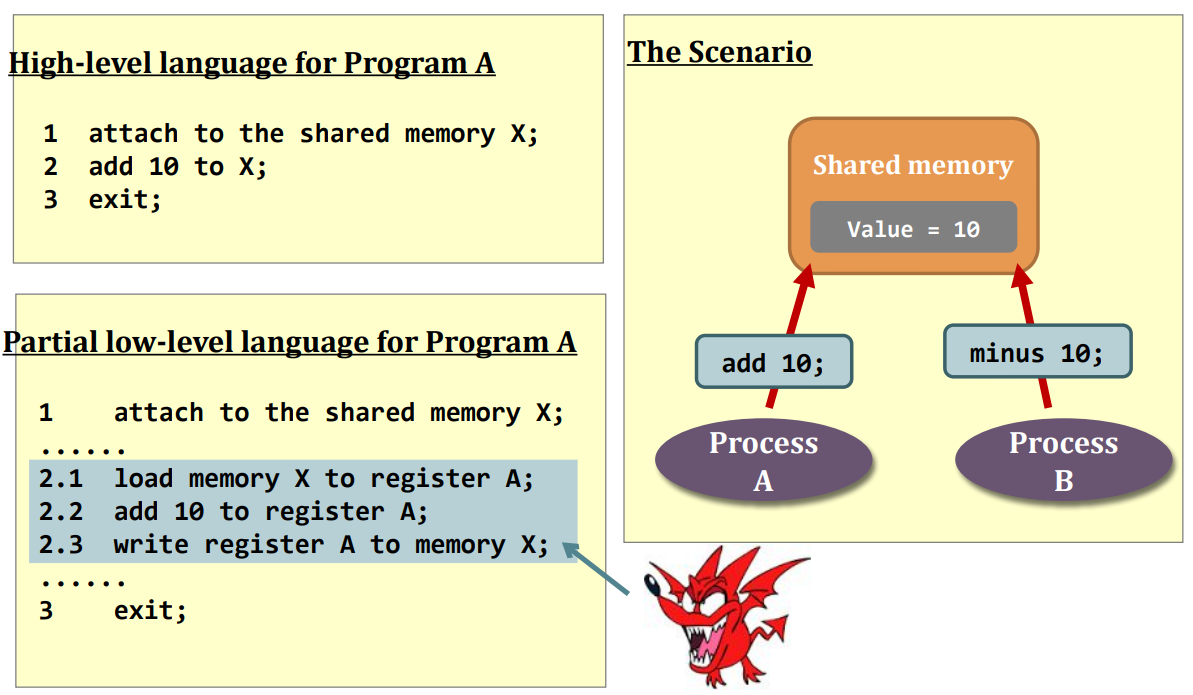
Race Condition
Normal execution and Abnormal execution
Normal execution
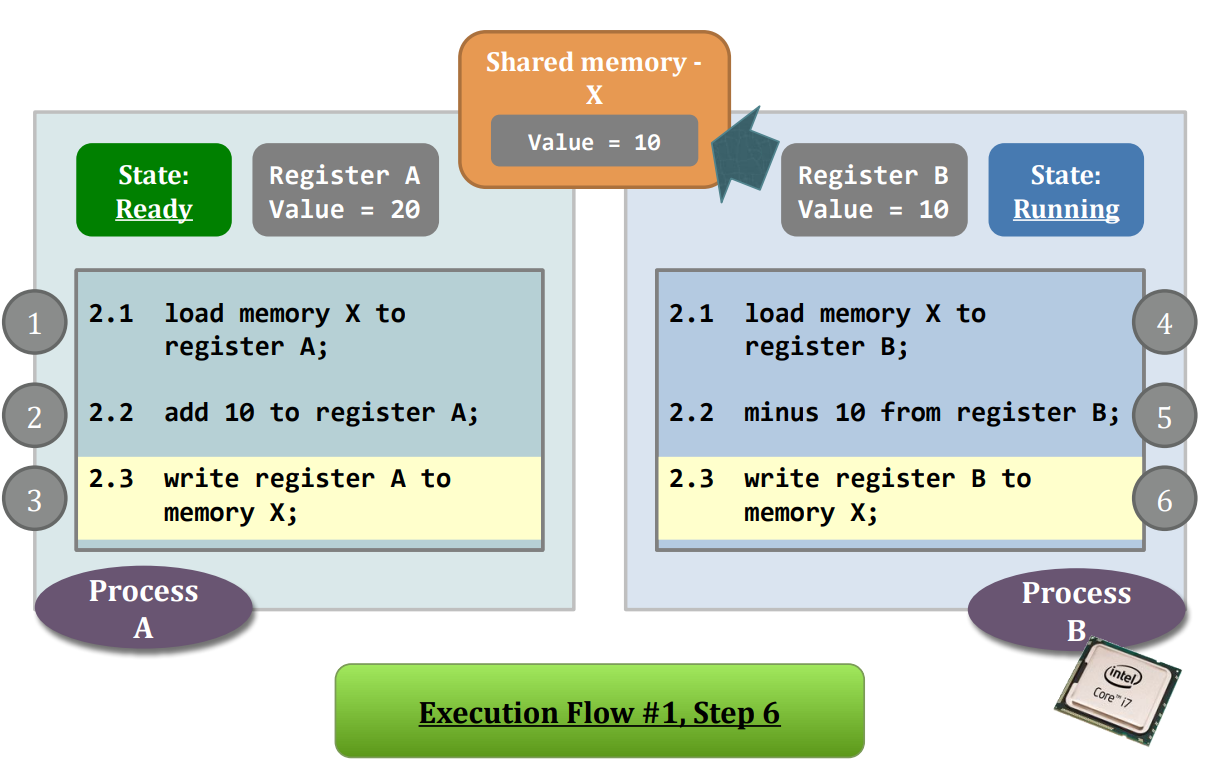
Abnormal execution
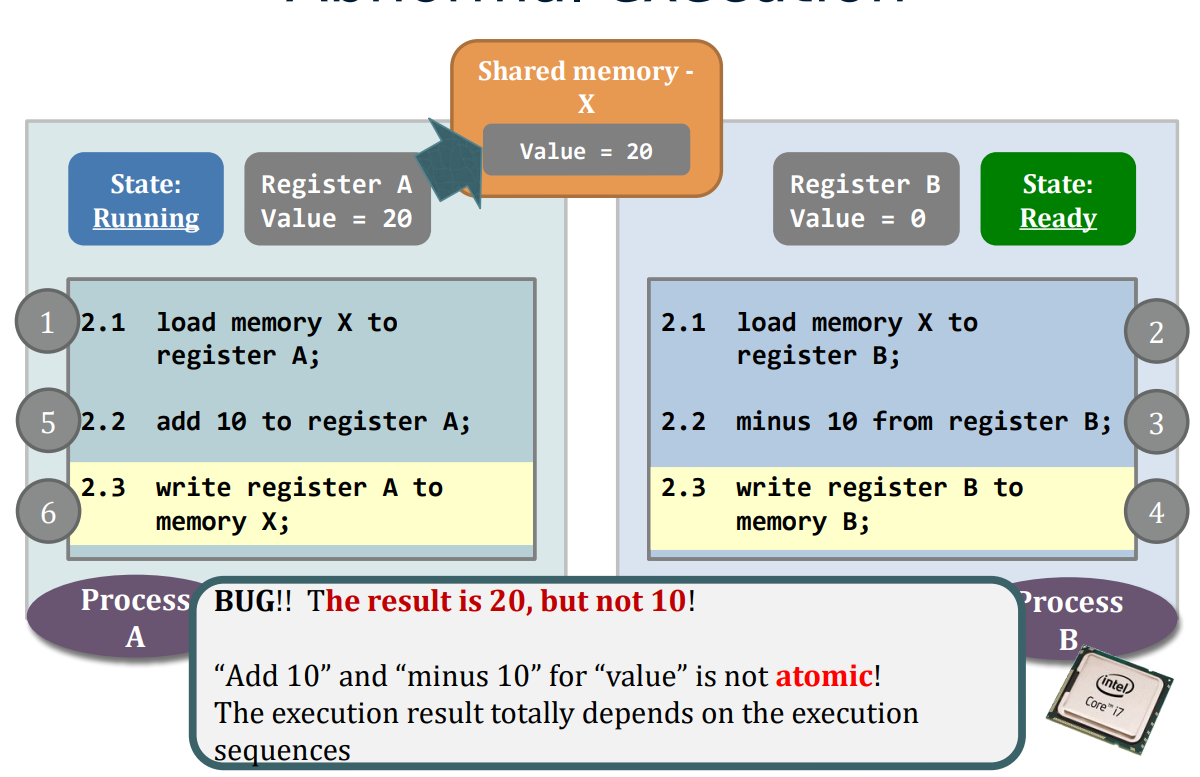
- The above scenario is called the race condition. May happen whenever shared object + multiple processes/threads + concurrently
- A race condition means +the outcome of an execution depends on a particular order in which the shared resource is accessed.
- Remember: race condition is always a bad thing and debugging race condition is a nightmare!
- It may end up …
- 99% of the executions are fine.
- 1% of the executions are problematic.
- It may end up …
Mutual Exclusion – the cure
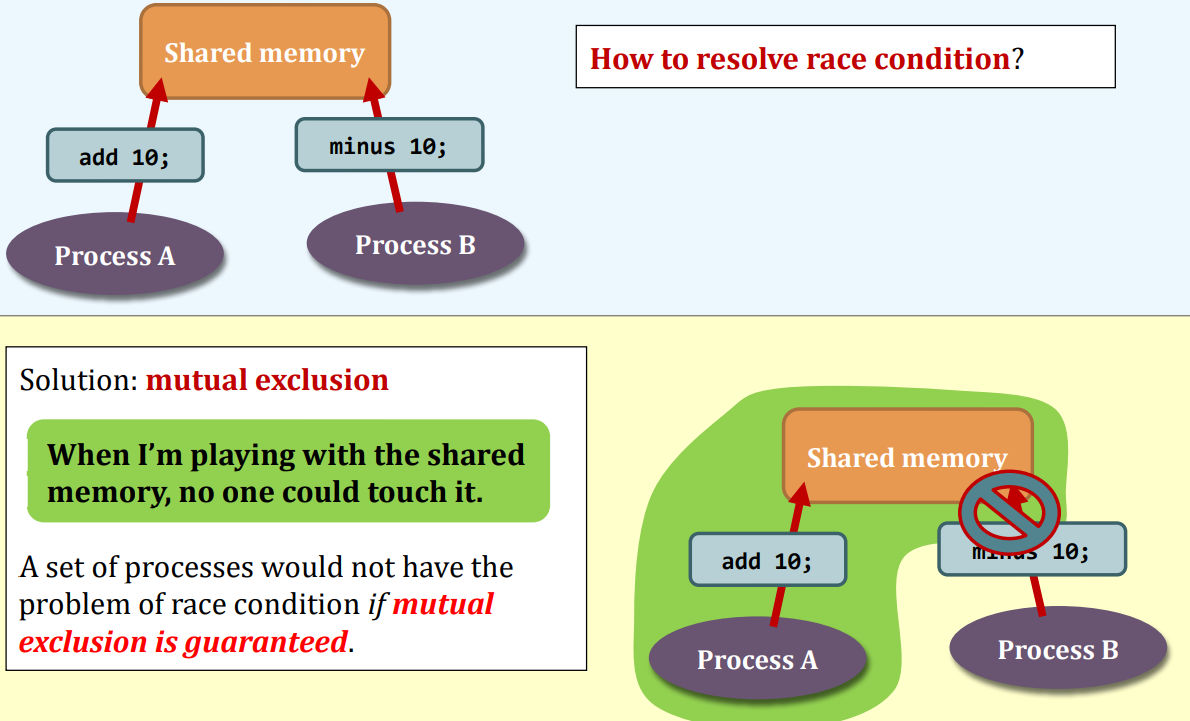
Solution - Mutual exclusion
- Shared object is still sharable, but
- Do not access the “shared object” at the same time
- Access the “shared object” one by one
Critical Section - the realization
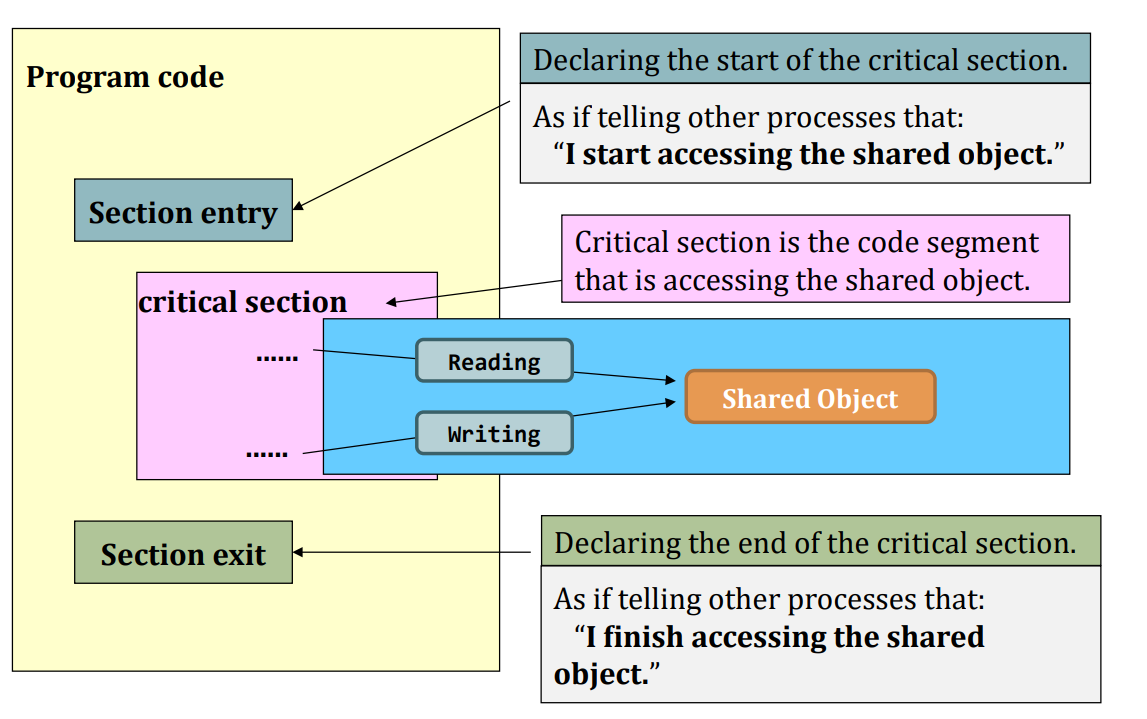
- Critical section is the code segment that is accessing the shared object
Critical Section (CS) – the realization
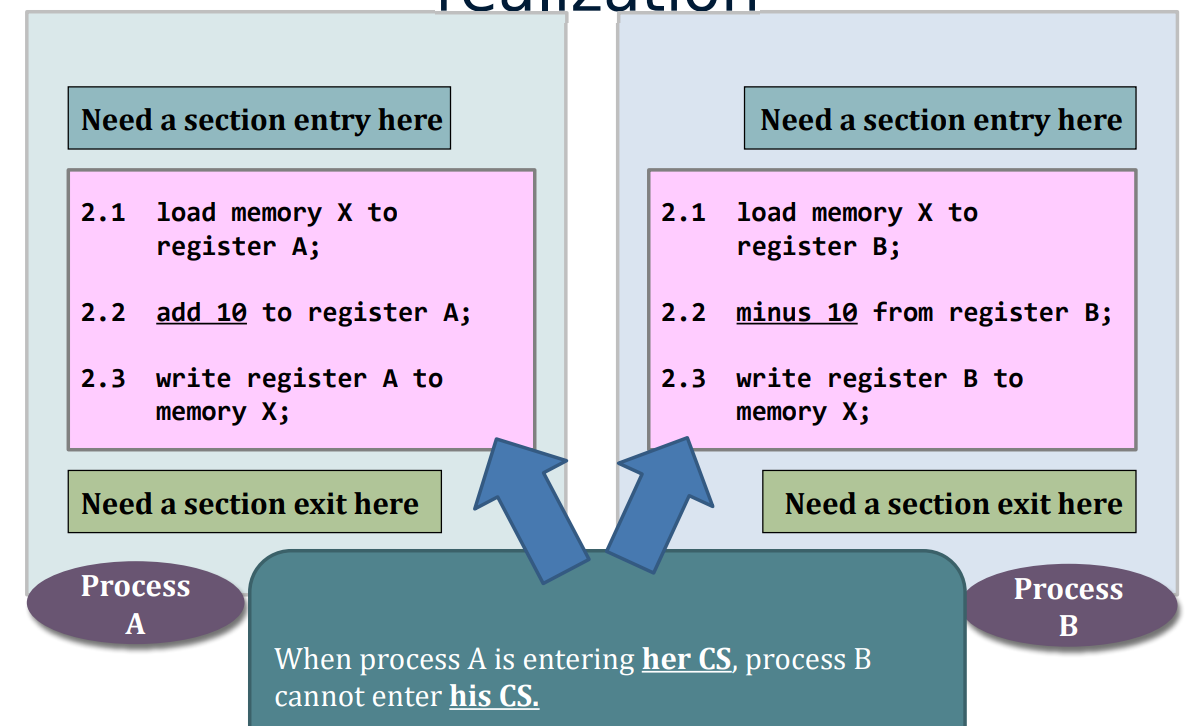
A typical mutual exclusion scenario
A typical mutual exclusion scenario
Summary
- Race condition
- Happens when programs accessing a shared object
- The outcome of the computation totally depends on the execution sequences of the processes involved
- Mutual exclusion is a requirement
- If it could be achieved, then the problem of the race condition would be gone.
- A critical section is the code segment that access shared objects.
- Critical section should be as tight as possible>
- Well, you can set the entire code of a program to be a big critical section
- But, the program will have a very high chance to block other processes or to be blocked by other processes
- Critical section should be as tight as possible>
- Note that *one critical section can be designed for accessing more than one shared objects**.
- Implementing section entry and exit is a challenge.
- The entry and the exit are the core parts that guarantee mutual exclusion
- Unless they are correctly implemented, race condition would appear.
- Mutual exclusion hinders(阻碍) the performance of parallel computations.
Entry and exit implementation - requirements
- Requirement #1. Mutual Exclusion
- No two processes could be simultaneously go inside their own critical sections.
- Requirement #2. Bounded Waiting
- Once a process starts trying to enter her CS, there is a bound on the number of times other processes can enter theirs.
- Requirement #3. Progress
- Say no process currently in C.S.
- One of the processes trying to enter will eventually get in.
#0 – disabling interrupt for the whole CS
- Aim
- To disable context switching when the process is inside the critical section.
- Effect
- When a process is in its critical section, no other processes could be able to run
- Correctness?
- Uni-core: Correct but not permissible
- at userspace: what if one writes a CS that loops infinitely and the other process(e.g., the shell) never gets the context switch back to kill it.
- Multi-core:Incorrect
- If there is another core modifying the shared object in the memory(unless you disable interrupts on all cores)
- Uni-core: Correct but not permissible
Achieving Mutual Exclusion
- Lock-based
- Use yet another shared objects: locks
- What about race condition on lock?
- Atomic instructions: instructions that cannot be "interrupted"
- Spin-based lock
- Process synchronization
- Basic spinning using 1 shared variable
- Peterson's solution: Spin using 2 shared variables
- Thread synchronization
pthread_spin_lock
- Process synchronization
- Sleep-based lock
- Process synchronization
- POSIX semaphore(信号标,旗语)
- Thread synchronization
pthread_mutex_lock
- Process synchronization
- Use yet another shared objects: locks
#1: Basic Spin lock(busy waiting)
- Idea.
- Loop on another shared object, turn, to detect the status of other process

- Correct
- but it wastes CPU resources
- OK for short waiting
- Especially these days we have multi-core
- Will not block other irrelevant processes a lot
- OK when spin-time < context-switch-overhead
- Especially these days we have multi-core
- Impose a strict alternation(交替) other
- SOmetimes you give me my turn but I'm not ready to enter CS yet
- Then you have to wait long
- SOmetimes you give me my turn but I'm not ready to enter CS yet
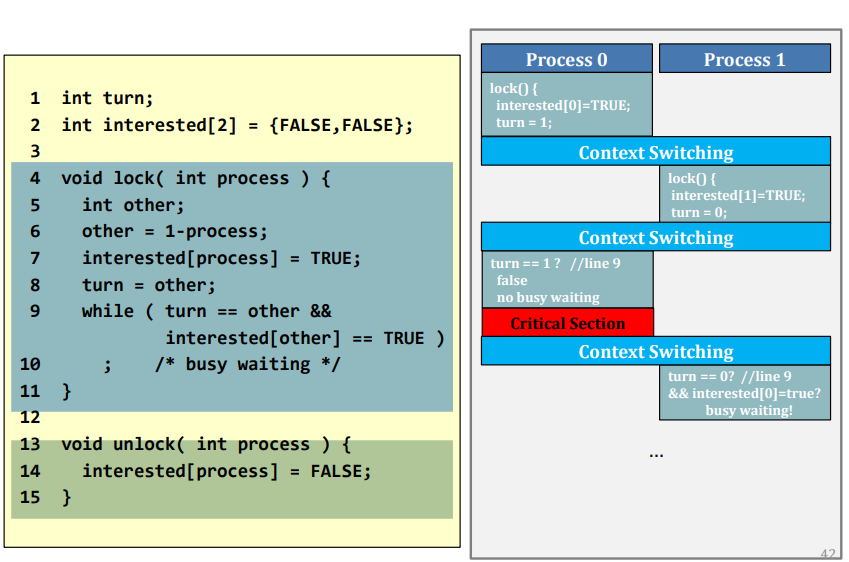
#1: Basic Spin lock violates progress

- Consider the following sequence:
- Process0 leaves cs(), set turn=1
- Process enter cs(), leaves cs()
- set turn=0, work on
remainder_section_slow()
- set turn=0, work on
- Process 0 loops back and enter cs() again, leaves cs(), set turn=1
- Process 0 finishes its
remainder_section(), go back to top of the loop- It can't enter its cs(), as turn=1
- That is process0 gets blocked, but Process 1 is outside its cs(), it is at its
remainder_section_slow()
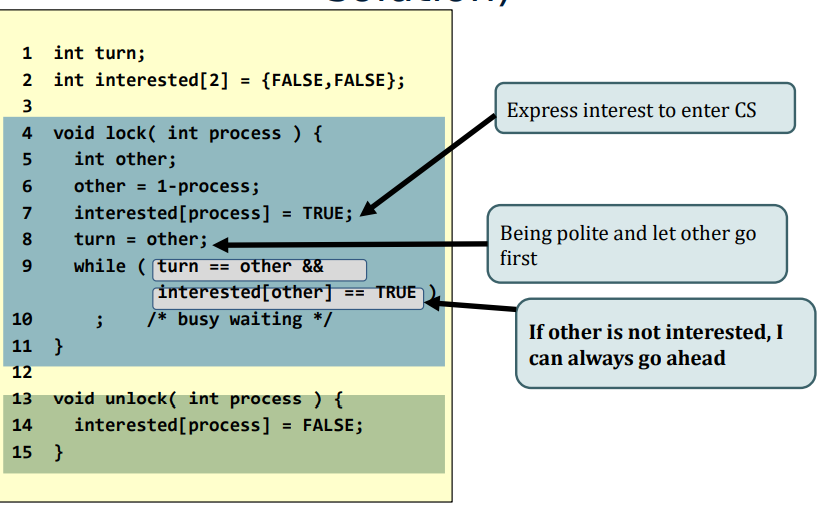
#2: Spin Smarter(by Peterson's solution)
- Highlight:
- Use one more extra shared object: interested
- If I am not interested
- I let you go
- If we are both interested
- Takes turns
- If I am not interested
- Use one more extra shared object: interested
1 | int turn; /* who is last enter cs */ |
Case 1
Case 2
Spin Smarter (by Peterson’s solution)
- Busy waiting
- shared variable turn for mutual exclusion
- shared variables interest to resolve strict alternation
- Peterson’s solution satisfies all three criteria! (Why?) > “It satisfies the three essential criteria to solve the critical section problem, provided that changes to the variables turn, interest[0], and interest[1] propagate immediately and atomically.”---wikipedia
- Suffer from priority inversion problem
Peterson’s solution satisfies three criteria
- Mutual exclusion
- interested[0] == interested[1] == true
- turn == 0 or turn == 1, not both
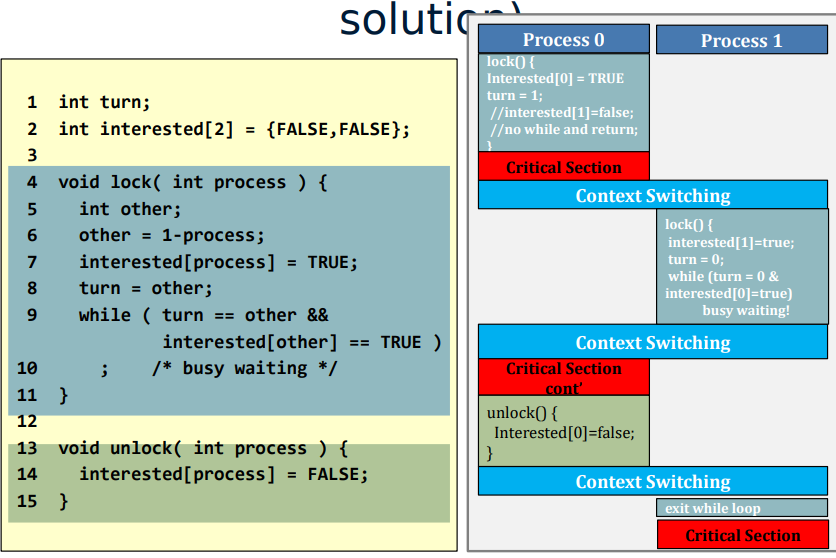
- Progress
- If only P0 to enter critical section
- interested[1] == false, thus P0 enters critical section
- If both P0 and P1 to enter critical section
- interested[0] == interested[1] == true and (turn == 0 or turn == 1)
- One of P0 and P1 will be selected
- If only P0 to enter critical section
- Bounded-waiting
- If both P0 and P1 to enter critical section, and P1 selected first
- When P1 exit, interested[1] = false
- If P0 runs fast: interested[1] == false, P0 enters critical section
- If P1 runs fast: interested[1] = true, but turn = 0, P0 enters critical section
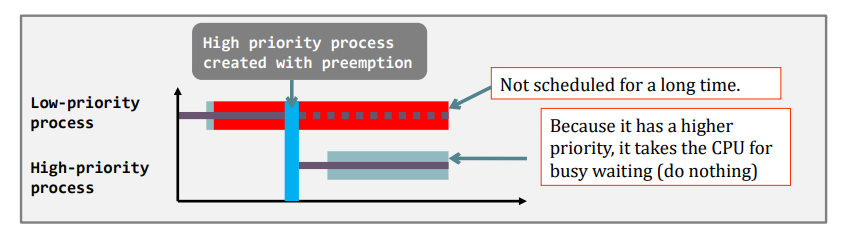
Peterson spinlock suffers from Priority Inversion
- Priority/Preemptive Scheduling (Linux, Windows… all OS..)
- A low priority process L is inside the critical region, but …
- A high priority process H gets the CPU and wants to enter the critical region.
- But H can not lock (because L has not unlock)
- So, H gets the CPU to do nothing but spinning
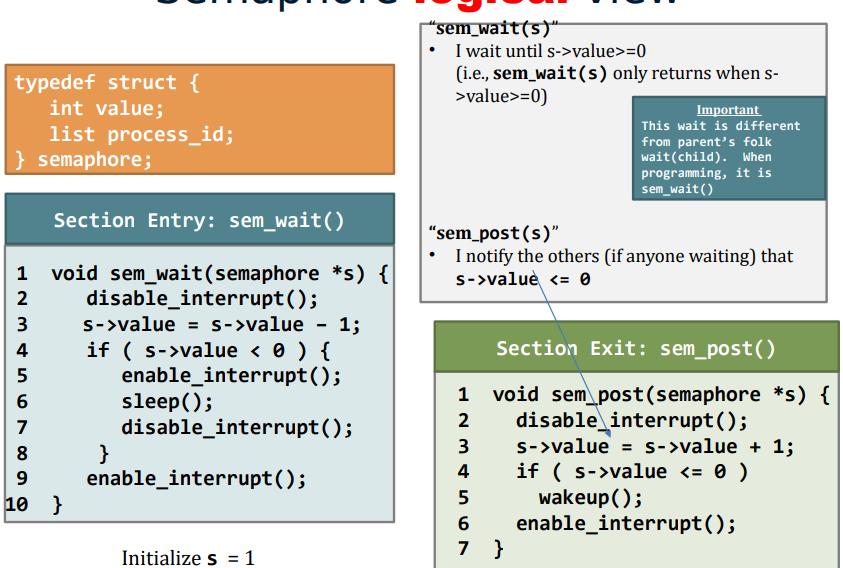
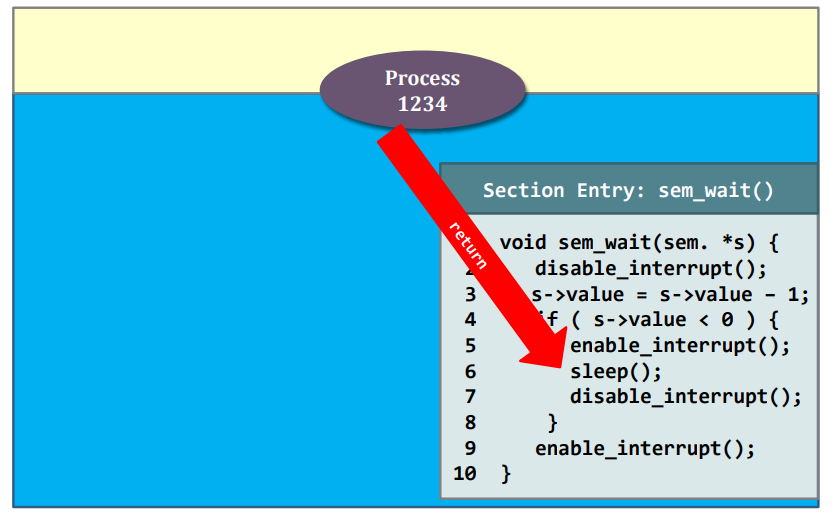
#3: Sleep-based lock: Semaphore
- Semaphore is just a struct, which includes
- an integer that counts the # of resources available
- Can do more than solving mutual exclusion
- a wait-list
- an integer that counts the # of resources available
- The trick is still the section entry/exit function implementation
- Need to interact with scheduler (must involve kernel, e.g., syscall)
- Implement uninterruptable section entry/exit
- Section entry/exit function are short
- Compared with Implementation #0 (uninterruptable throughout the whole CS)
- Section entry/exit function are short
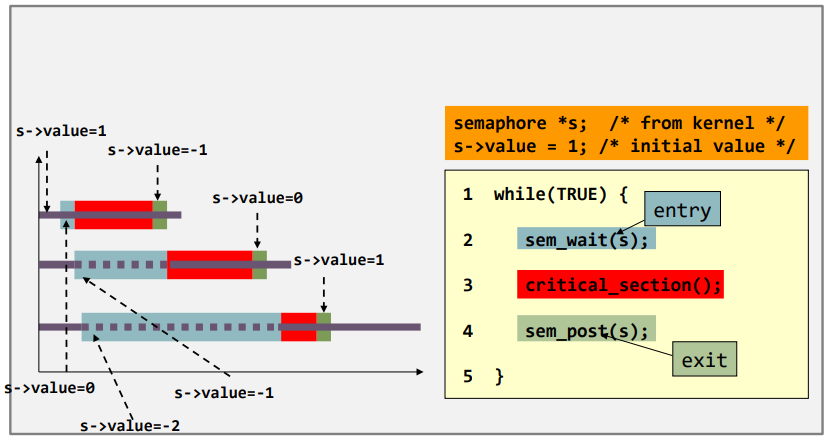
Semaphore logical view
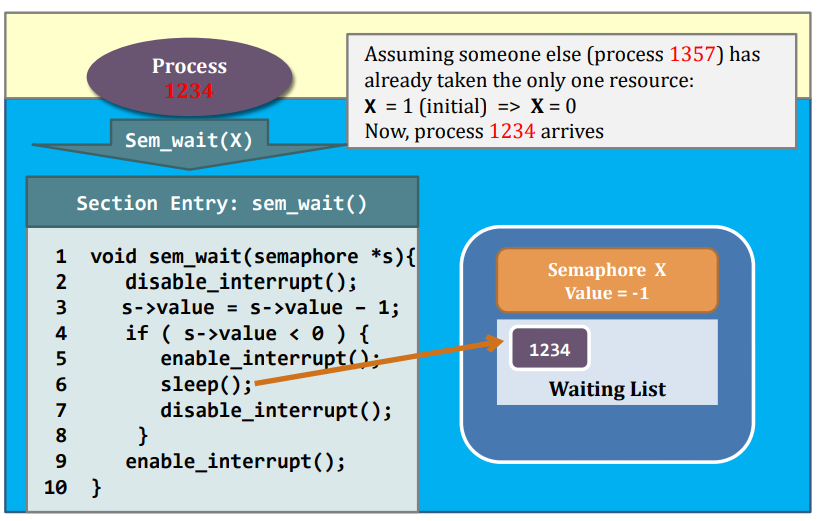
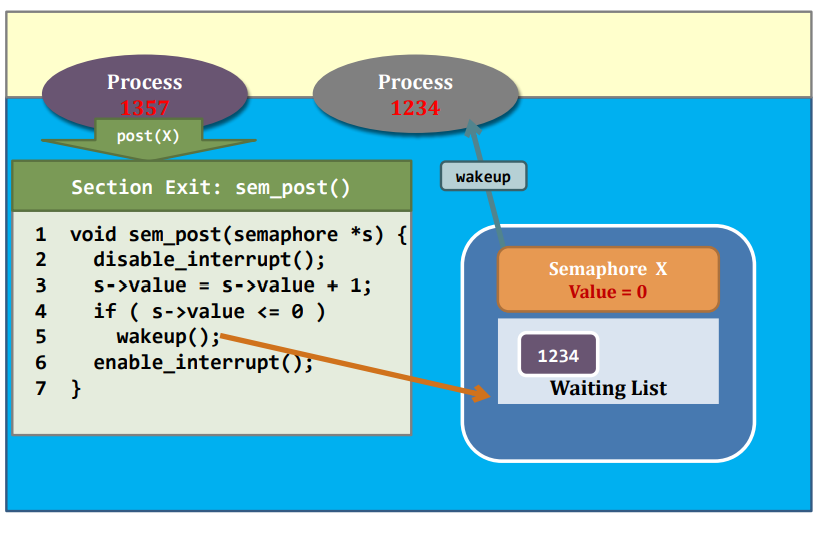
Using Semaphore(User-level)
Using Semaphore beyond mutual exclusion
| Problem | Properties |
|---|---|
| Producer-Consumer Problem | Two classes of processes: producer and consumer;At least one producer and one consumer.[Single-Object Synchronization] |
| Dining Philosopher Problem | They are all running the same program;At least two processes.[Multi-Object Synchronization] |
| Reader Writer Problem | Multiple reads, 1 write |
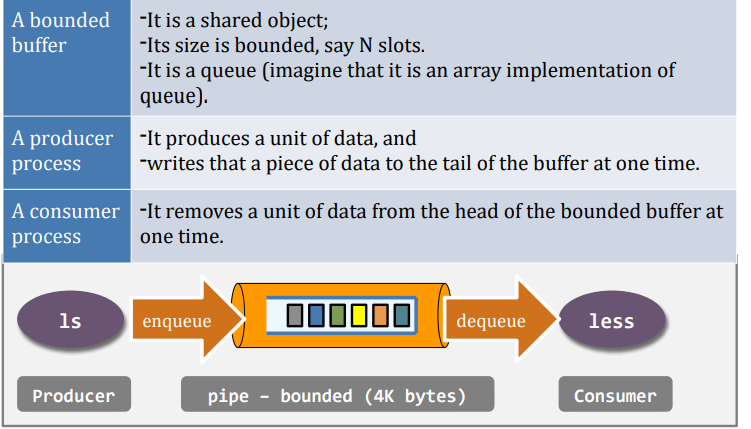
Producer-consumer problem – introduction
- Also known as the bounded-buffer problem.
- Single-object synchronization
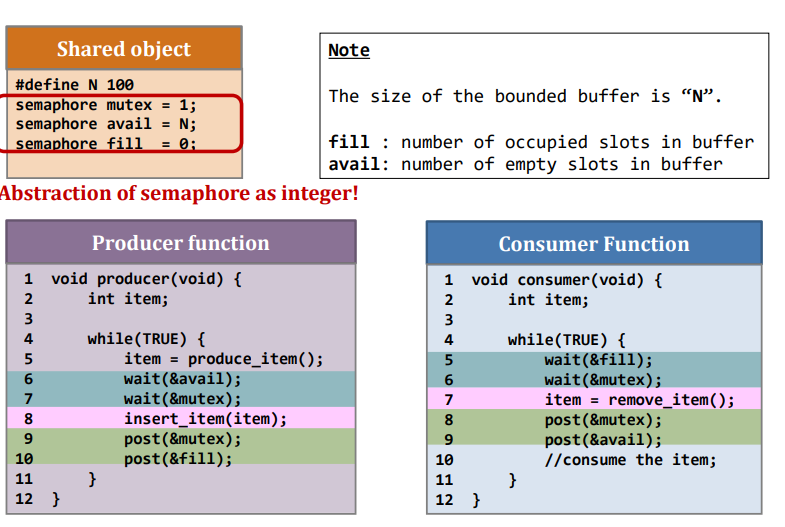
Producer-consumer problem: semaphore
- The problem can be divided into two sub-problems.
- Mutual exclusion
- The buffer is a shared object. MUtual exclusion is needed. Done by one binary semaphore
- Synchronization.
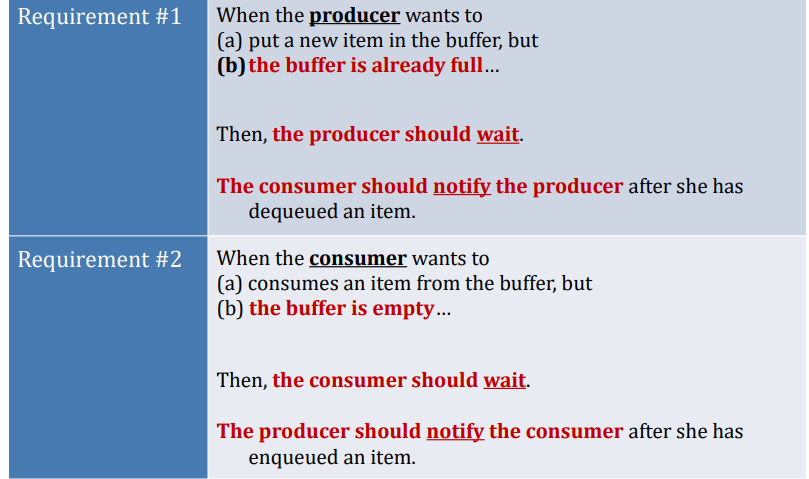
- Because the buffer’s size is bounded, coordination is needed. Done by two semaphores
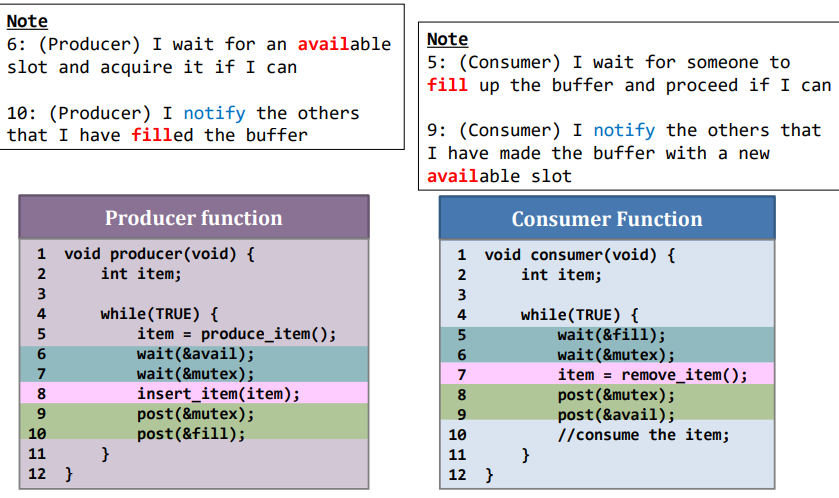
- Notify the producer to stop producing when the buffer is full
- In other words, notify the producer to produce when the buffer is NOT full
- Notify the consumer to stop eating when the buffer is empty
- In other words, notify the consumer to consume when the buffer is NOT empty
- Notify the producer to stop producing when the buffer is full
- Because the buffer’s size is bounded, coordination is needed. Done by two semaphores
- Mutual exclusion
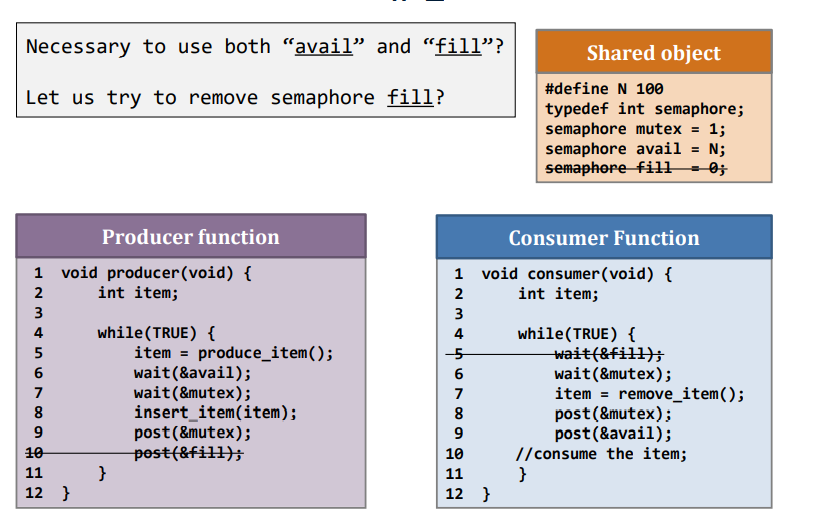
Producer-consumer problem – question #1
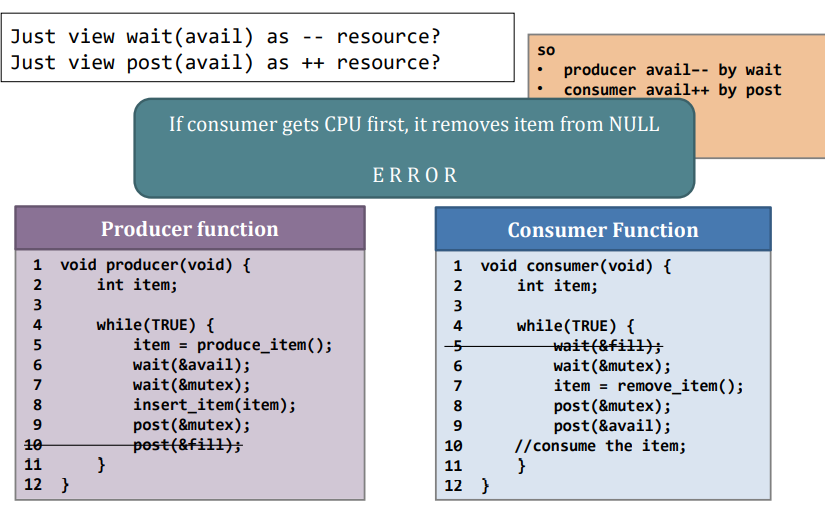
Producer-consumer problem – question #2
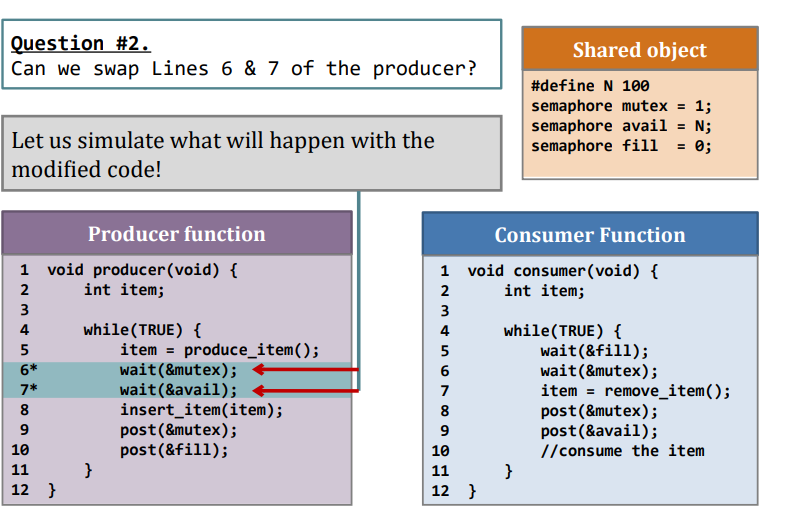
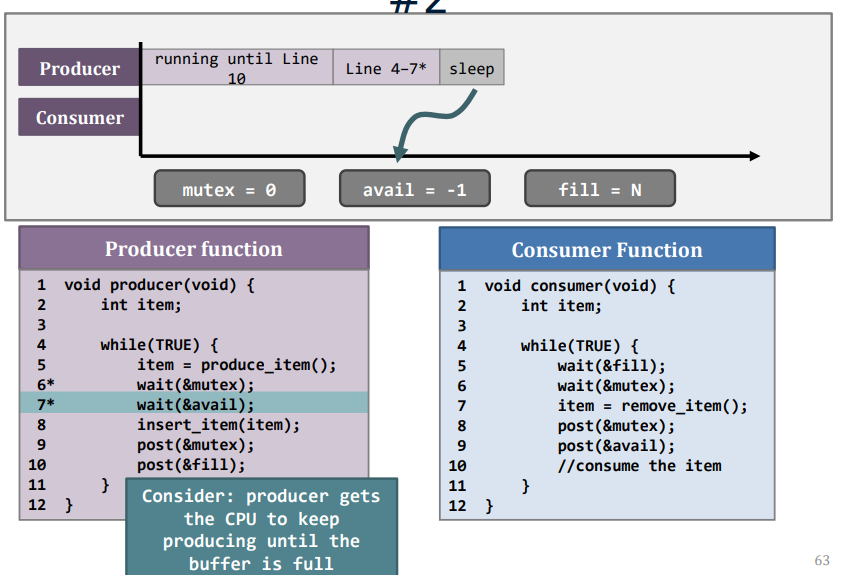
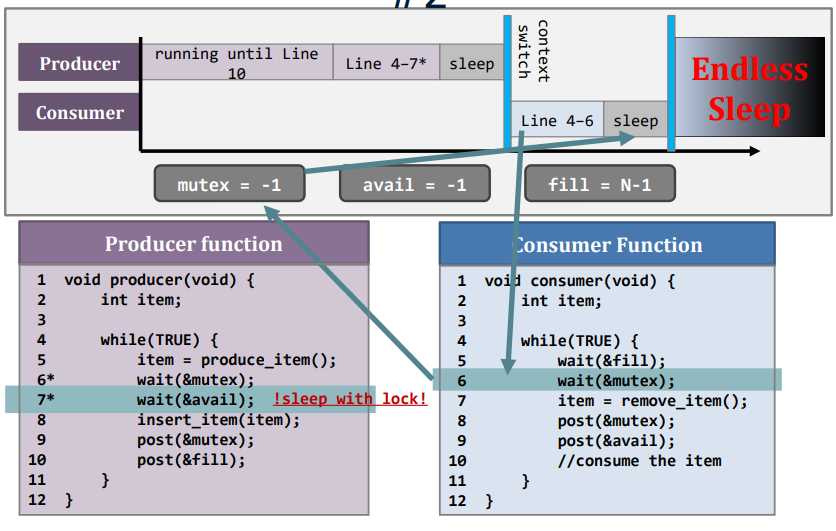
- This scenario is called a deadlock
- Consumer waits for Producer’s mutex at line 6
- i.e., it waits for Producer (line 9) to unlock the mutex
- Producer waits for Consumer’s avail at line 7
- i.e., it waits for Consumer (line 9) to release avail
- Consumer waits for Producer’s mutex at line 6
- Implication: careless implementation of the producer-consumer solution can be disastrous(灾难性的).
Deadlock
Summary on producer-consumer problem
- How to avoid race condition on the shared buffer?
- E.g., Use a binary semaphore
- How to achieve synchronization?
- E.g., Use two semaphores: fill and avail
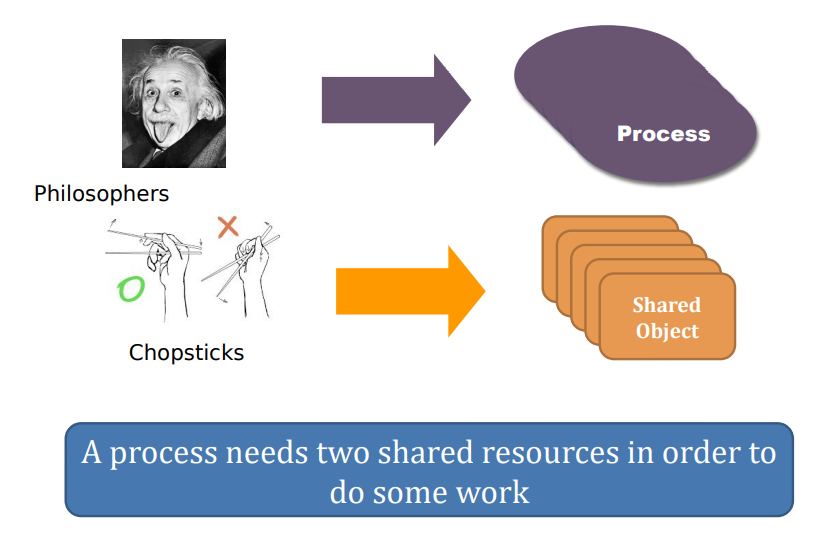
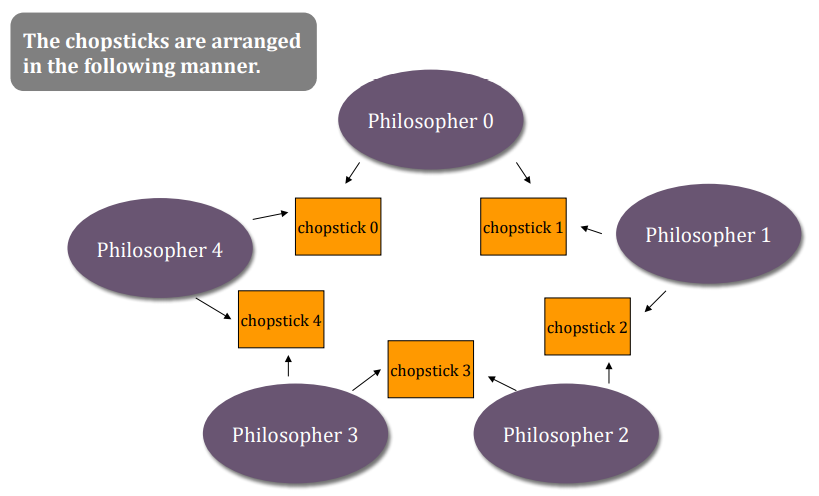
Dining philosopher – introduction
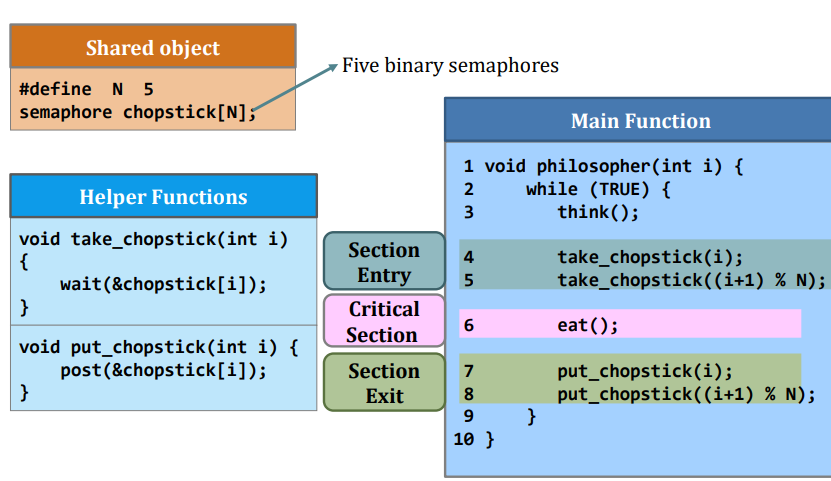
- 5 philosophers, 5 plates of spaghetti, and 5 chopsticks.
- The jobs of each philosopher are to think and to eat +They need exactly two chopsticks in order to eat the spaghetti.
- Question: how to construct a synchronization protocol such that they:
- will not starve to death, and
- will not result in any deadlock scenarios?
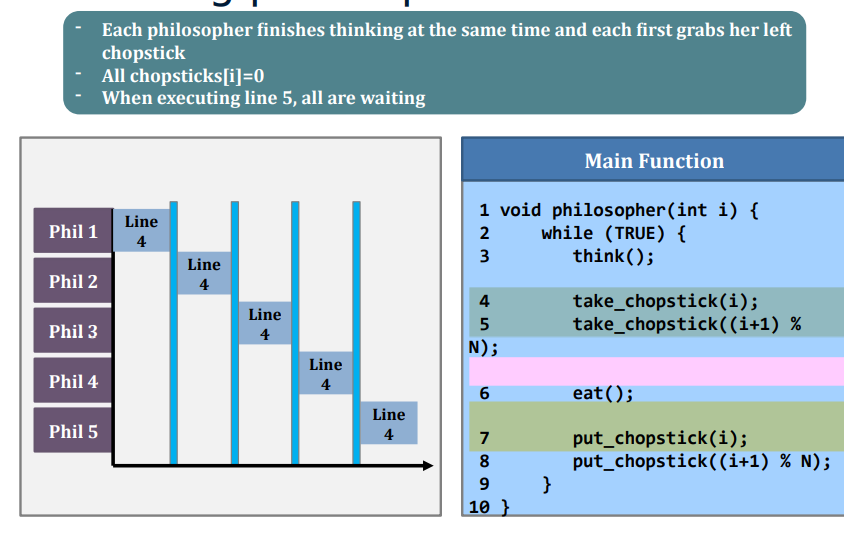
- A waits for B’s chopstick
- B waits for C’s chopstick
- C waits for A’s chopstick …
- It’s a multi-object synchronization problem
Dining philosopher - introduction
Dining philosopher – requirement #1
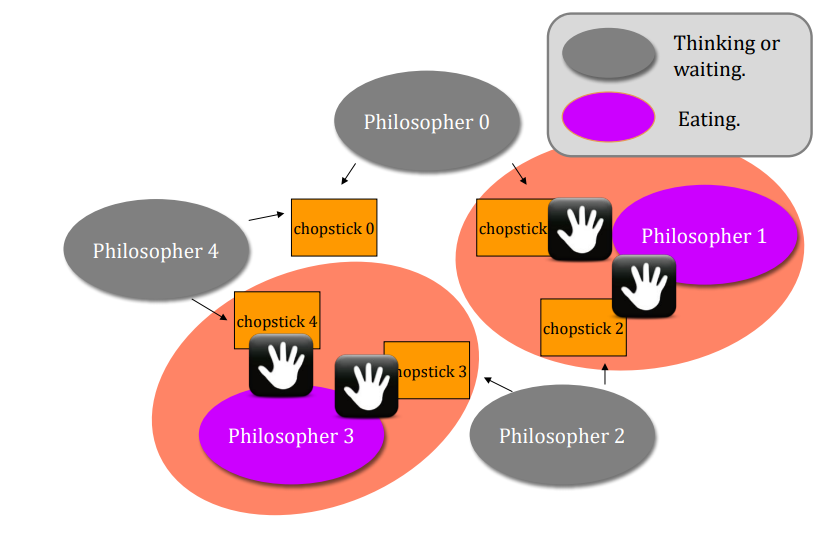
- Mutual exclusion
- While you are eating, people cannot steal your chopstick
- Two persons cannot hold the same chopstick
- Let’s propose the following solution
- When you are hungry, you have to check if anyone is using the chopsticks that you need.
- If yes, you wait
- If no, seize both chopsticks
- After eating, put down both your chopsticks.
Dining philosopher – meeting requirement #1?
Dining philosopher - deadlock
Dining philosopher – requirement #2
- Synchronization
- Should avoid deadlock.
- How about the following suggestions:
- First, a philosopher takes a chopstick.
- If a philosopher finds that she cannot take the second chopstick, then she should put it down.
- Then, the philosopher goes to sleep for a while.
- When wake up, she retries
- Loop until both chopsticks are seized.
Dining philosopher – meeting requirement #2?
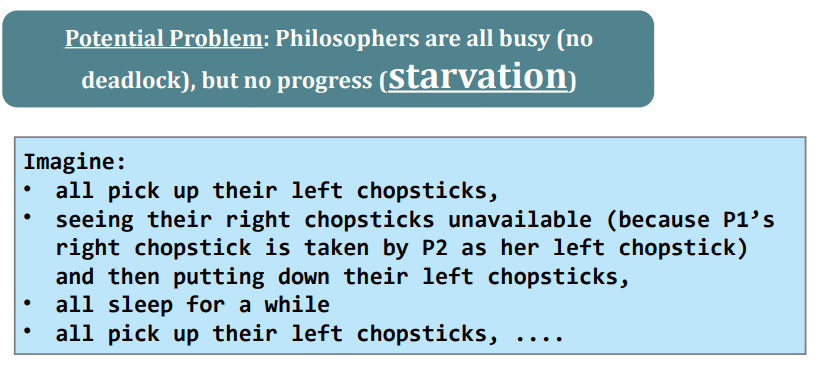
Dining philosopher – before the final solution
Before we present the final solution, let us see what problems we have.
- Problems
- Model each chopstick as a semaphore is intuitive, but may cause deadlock
- Using sleep() to avoid deadlock is effective, yet creating starvation.

Dining philosopher – the final solution
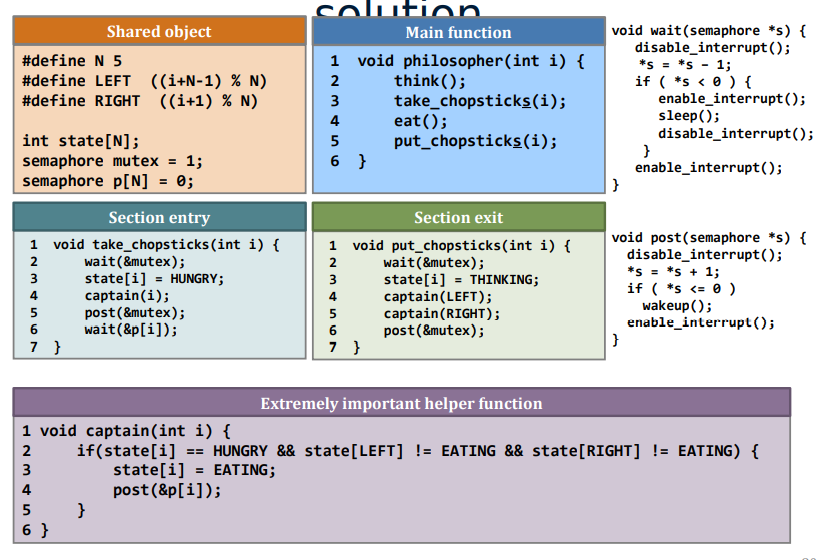
Dining philosopher – Hungry
Dining philosopher – Finish eating

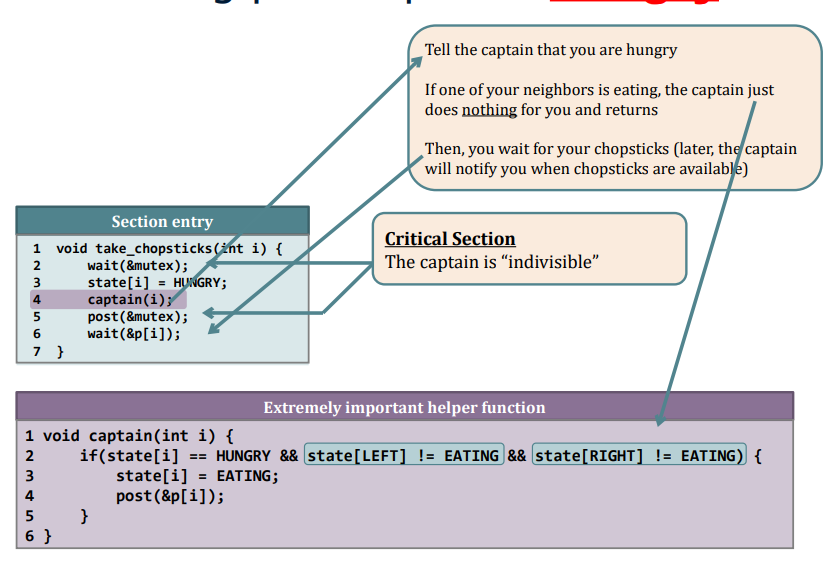
Dining philosopher – the core
- 5 philosophers -> ideally how many chopsticks?
- how many chopsticks do we have now?
- Very common in today’s cloud computing multi-tenancy model
Summary on IPC problems
- The problems have the following properties in common:
- Multiple number of processes;
- Processes have to be synchronized in order to generate useful output;
- Each resource may be shared as well as limited, and there may be more than one shared processes.
- The synchronization algorithms have the following requirements in common:
- Guarantee mutual exclusion;
- Uphold(维护) the correct synchronization among processes; and
- (must be) Deadlock-free.
Heisenbugs
- Jim Gray, 1998 ACM Turing Award winner, coined that term
- You find your program P has a concurrency bug
- You insert ‘printf’ statements or GDB to debug P
- Then because of those debugging things added, P behaves normally when you are in debug mode