Lecture 5: Job Schedule
What is context switching?
- Scheduling is the procedure that decides which process to run next.
- Context switching is the actual switching procedure, from one process to another
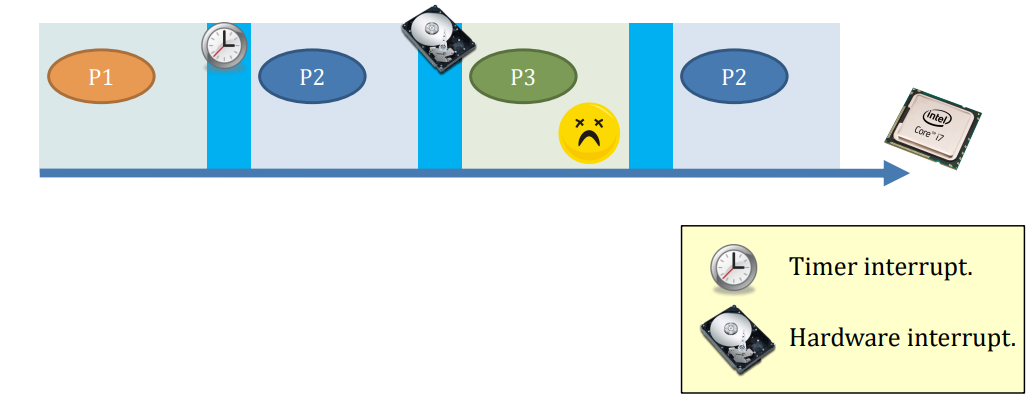
Whenever a process goes to blocking / waiting state. E.g., wait()/sleep() is called
- A POSIX signal arrives (e.g., SIGCHLD)
- An interrupt arrives (e.g., keystroke(键击,按键))
- When the OS scheduler says “time’s up!” (e.g., round-robin)
- Put it back to "ready"
- When the OS scheduler says “hey, I know you haven’t finished, but the PRESIDENT just arrives, please hold on” (e.g., preemptive(先发制人), round-robin with priority)
- Put it back to "ready"
Why?
- For multi-tasking
- For fully utilize the CPU
CPU Switch From Process A to Process B
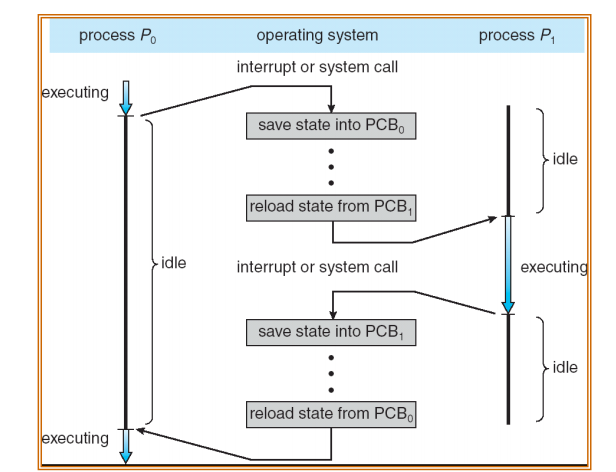
- This is also called a “context switch”
- Code executed in kernel above is overhead
Context switching
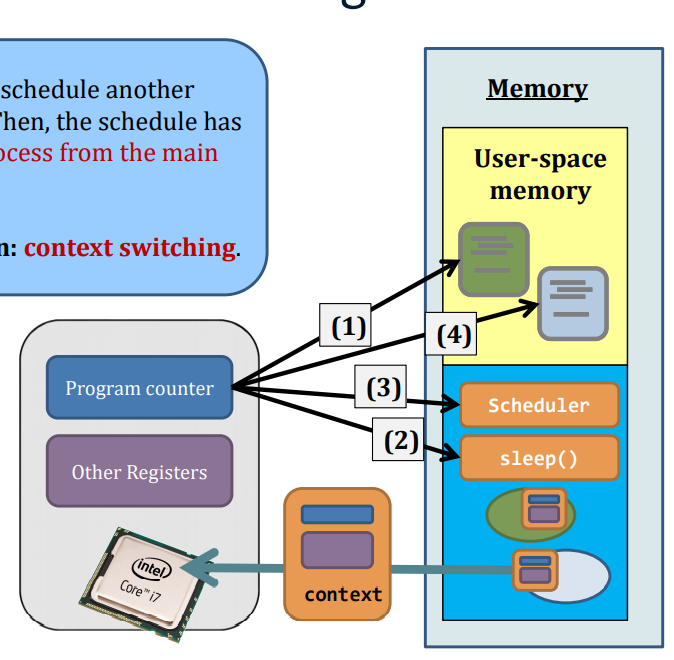
Suppose this process gives up running on the CPU, e.g., calling sleep(). Then:
- Running --> Interruptible Wait
Now, it is time for the scheduler to choose the next process to run.
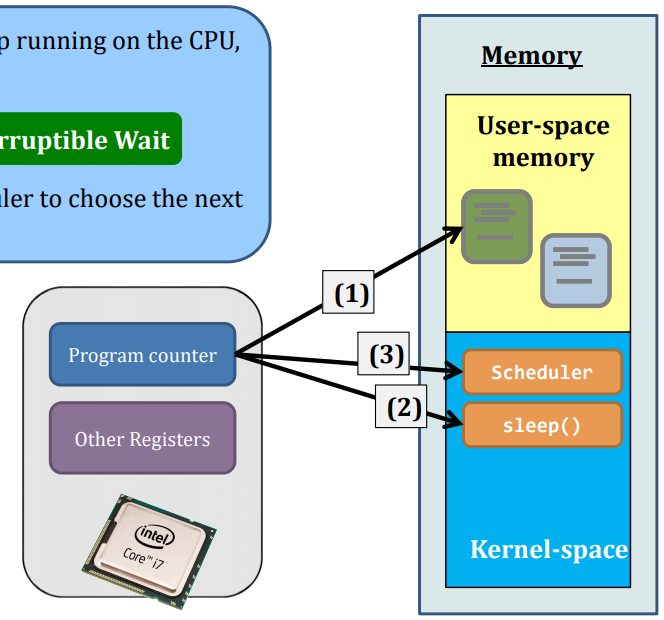
But, before the scheduler can seize(抓住) the control of the CPU, a very important step has to be taken:
- Backup all current context of that process to the kernel-space’s PCB:
- current register values
- program counter (which line of code the current program is at)
Say, the scheduler decides to schedule another process in the ready queue. Then, the schedule has to load the context of that process from the main memory to the CPU.
We call the entire operation: context switching.
Context switch is expensive
- Direct costs in kernel:
- Save and restore registers, etc.
- Switch address space (expensive instructions)
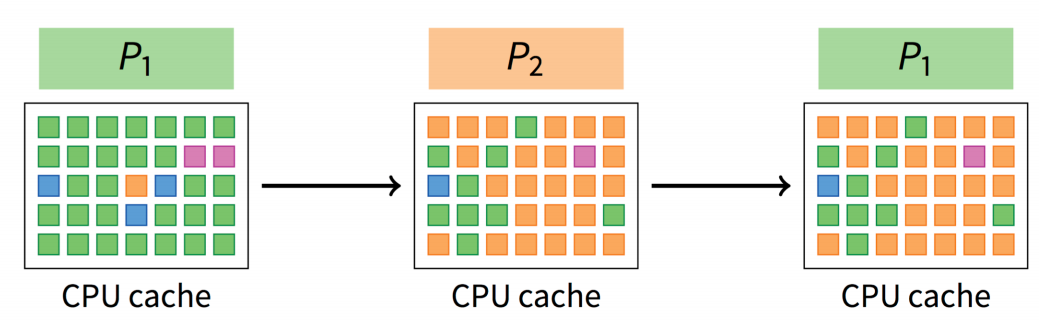
- Indirect costs: cache, buffer cache, & TLB misses
What is process scheduling?
- Scheduling is an important topic in the research of the operating system.
- Related theoretical topics are covered in computer system performance evaluation.
- Scheduling is required because the number of computing resource – the CPU – is limited.
| CPU-bound Process | I/O-bound process |
|---|---|
| Spends most of its running time on the CPU, i.e., user-time > sys-time | Spends most of its running time on I/O, i.e., sys-time > user-time |
| Examples - AI course assignments | Examples - /bin/ls, networking programs |
Classes of process scheduling
Preemptive(先发制人) scheduling (Non-preemptive is out)
- What is it?
- When a process is chosen by the scheduler, the process would have the CPU until...
- the process voluntarily waits I/O, or
- the process voluntarily releases the CPU, e.g., exit()
- particular kinds of interrupts (e.g., periodic clock interrupt, a new process steps in) are detected.
- When a process is chosen by the scheduler, the process would have the CPU until...
- History
- In old days, it was called “time-sharing”
- Nowadays, all systems are time-sharing
- Pros
- Good for systems that emphasize interactiveness.
- Because every task will receive attentions from the CPU
- Cons
- Bad for systems that emphasize the time in finishing tasks
Scheduling algorithms
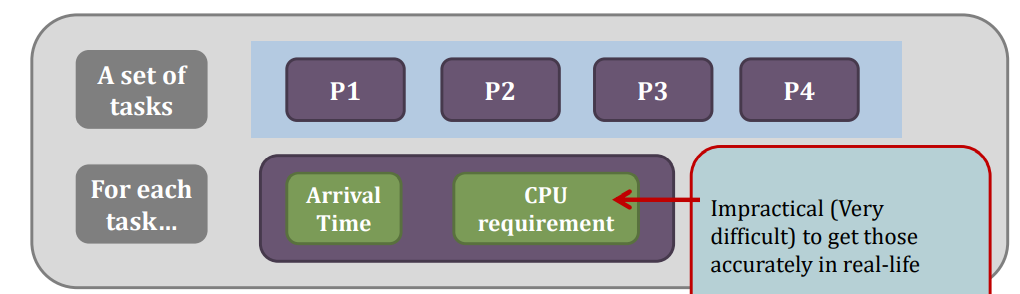
- Inputs to the algorithms
Online vs Offline
An offline scheduling algorithm assumes that you know the sequence of processes that a scheduler will face
- Theoretical baseline
An online scheduling algorithm does not have such an assumption.
- Practical use
Algorithm evaluation
- Number of context switches
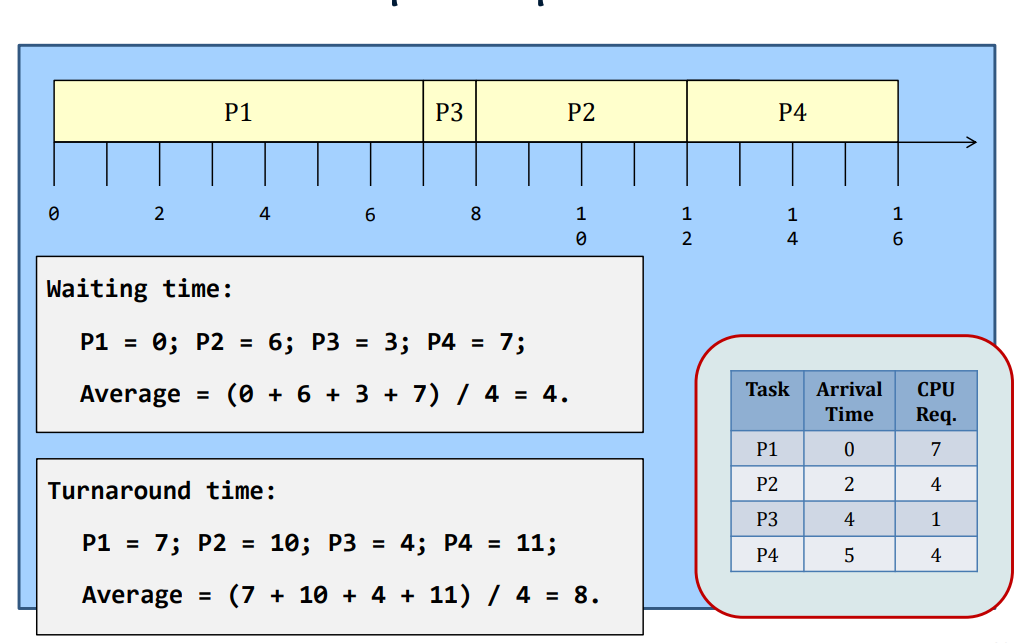
- Individual & average turnaround time
Individual & average waiting time
- Turnaround time
- The time between the arrival of the task and the termination of the task.
- Waiting time
- The accumulated time that a task has waited for the CPU.
Different algorithms
- Algorithms
- Shortest-job-first (SJF)
- Round-robin (RR)
- Priority scheduling with multiple queues.
- … (lab session)
Assumption: context switch is free (in practice, it is expensive)
Non-preemptive SJF
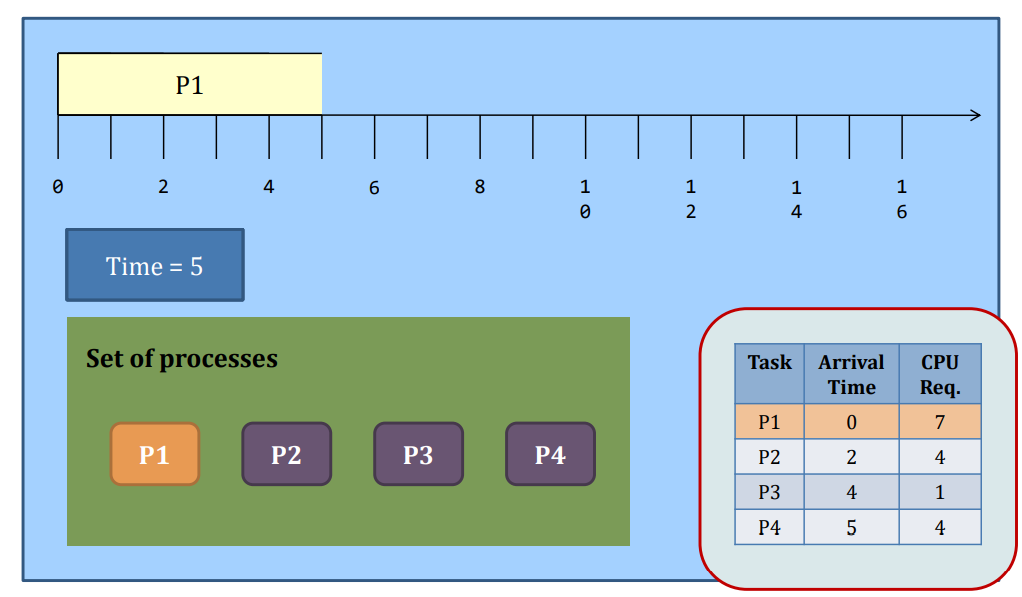
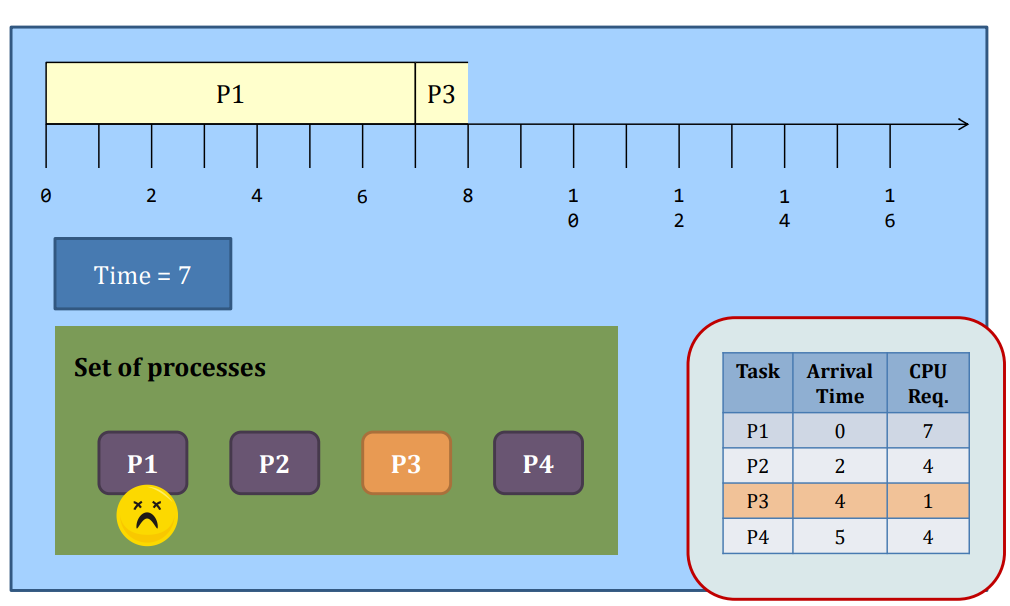
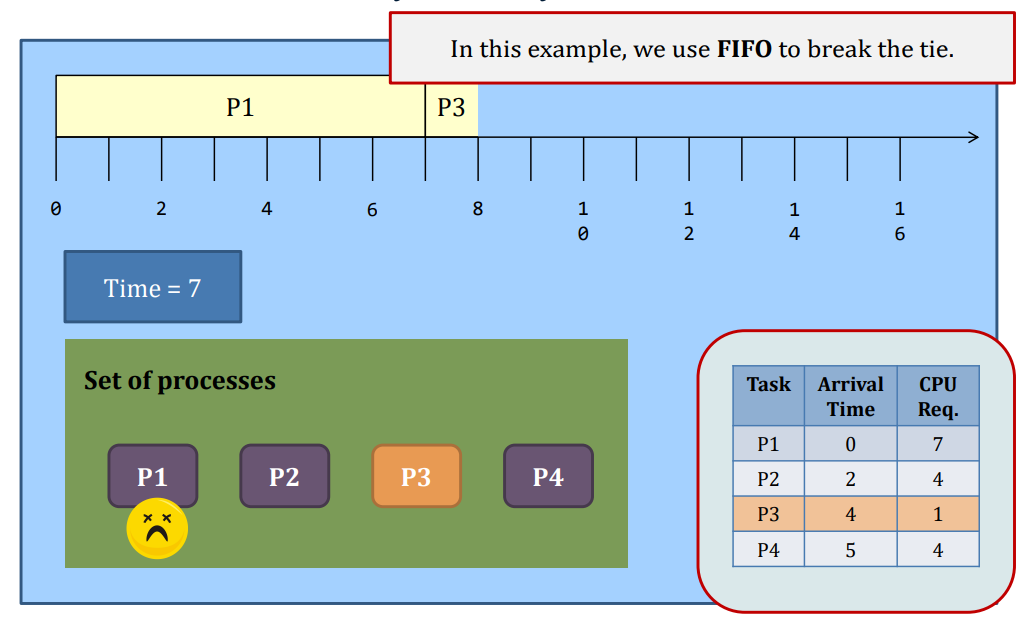
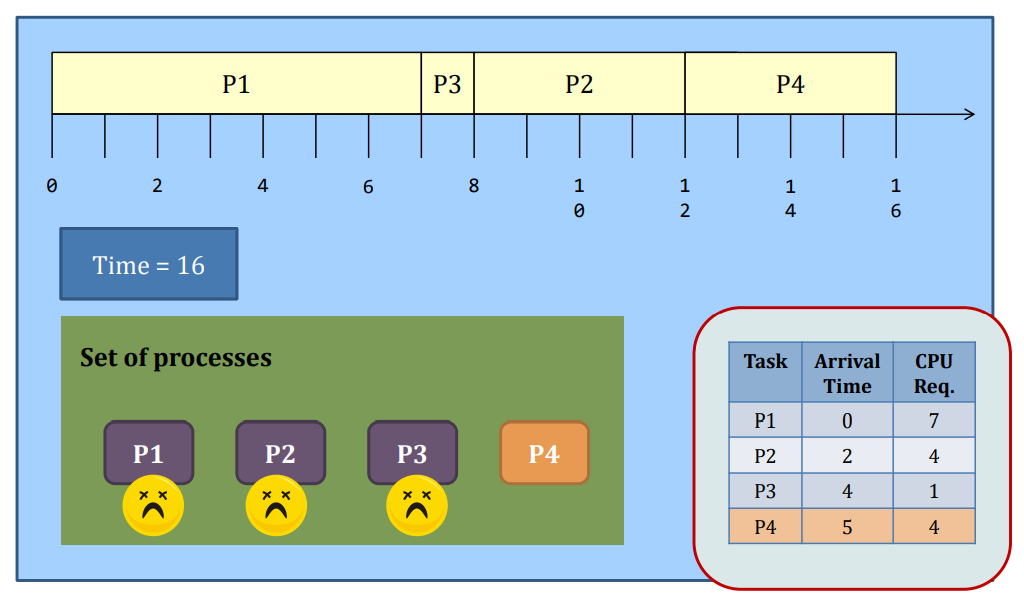
SJF
Problem
- What if tasks arrive after P2 all have CPU requirement < 3?
- Problem persists even for its preemptive version
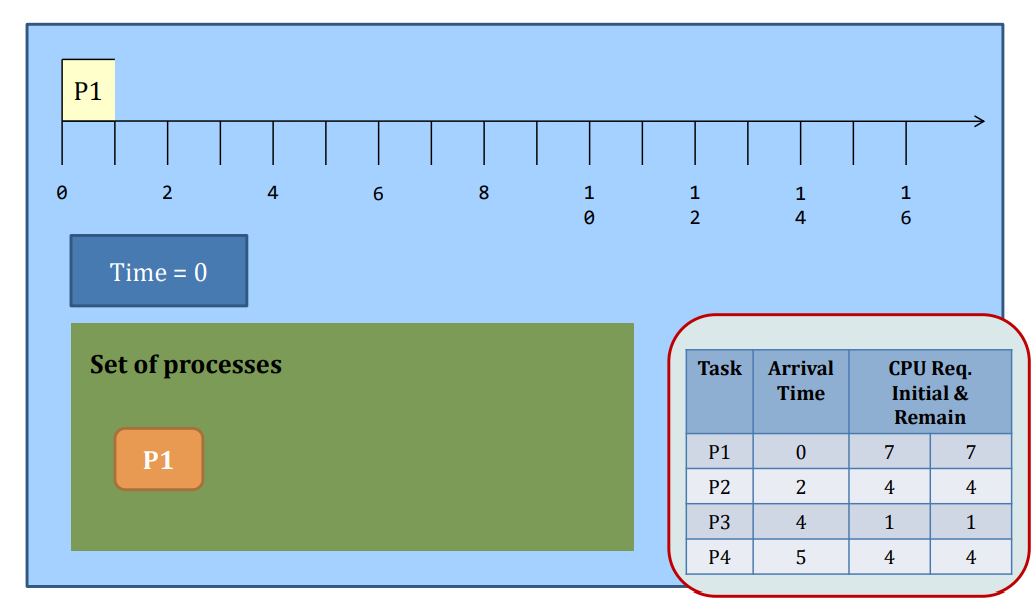
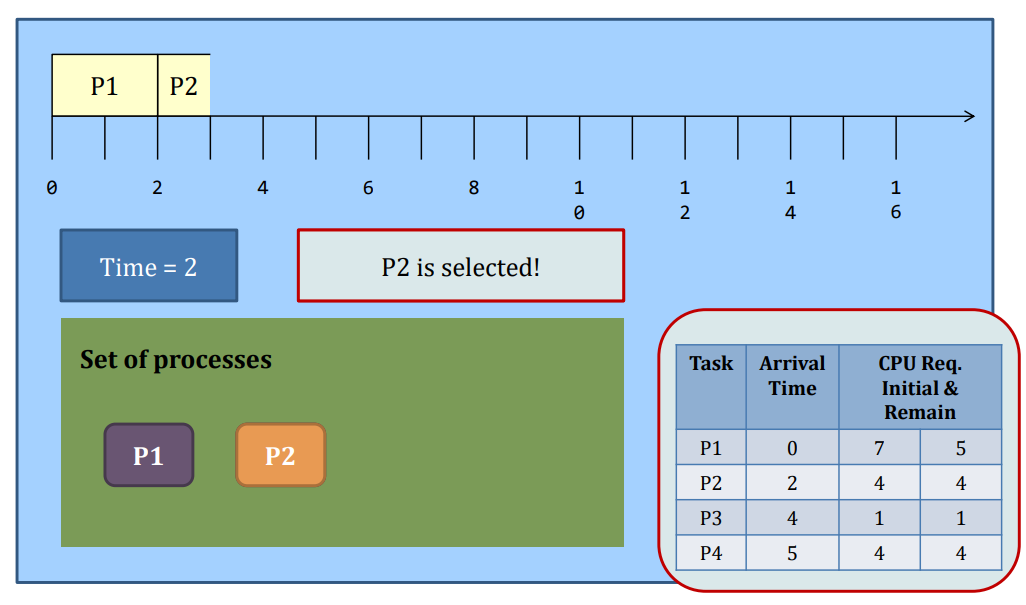
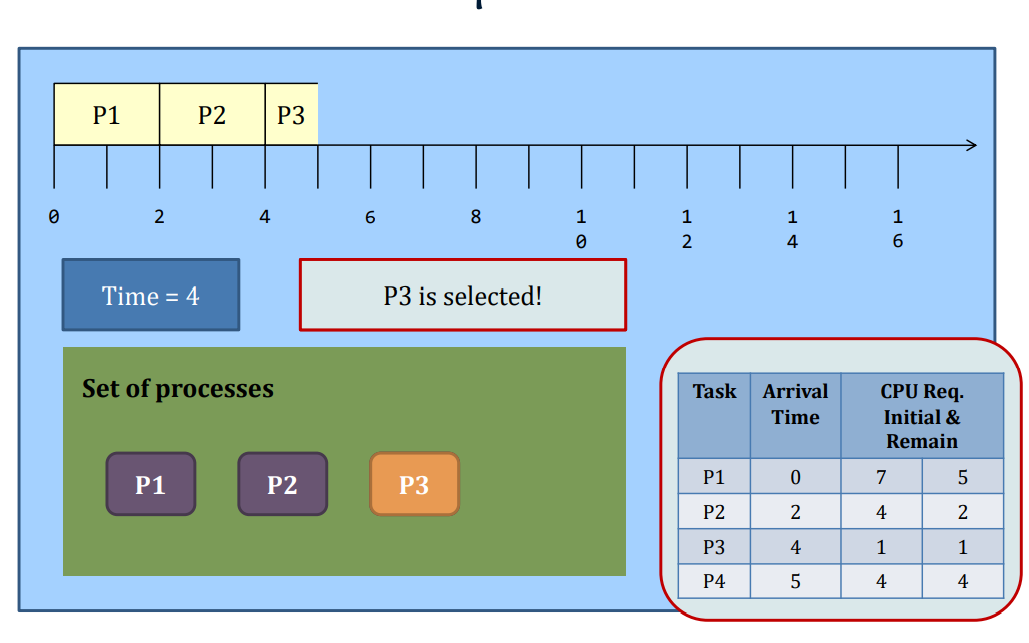
Preemptive SJF
-Whenever a new process arrives at the system, the scheduler steps in and selects the next task based on their remaining CPU requirements.

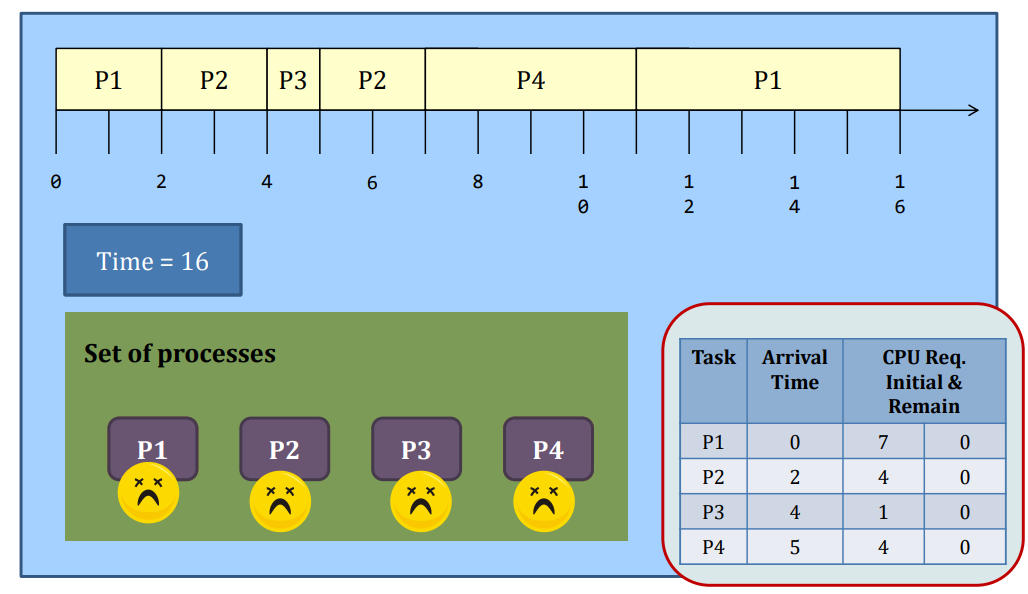
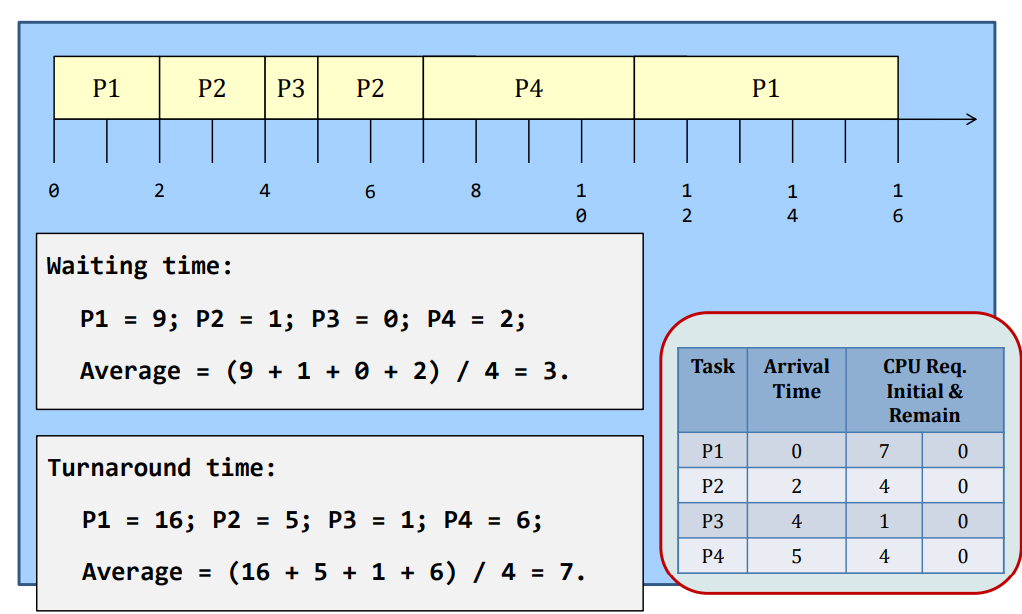
SJF: Preemptive or not?
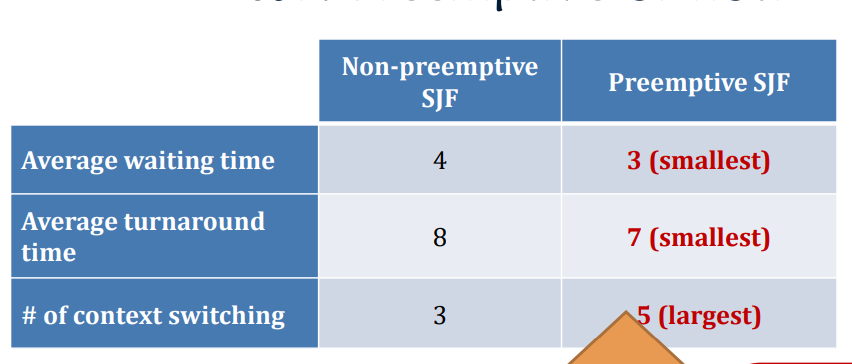
The waiting time and the turnaround time decrease at the expense of the increased number of context switches.
Context switch is expensive. (That’s why we shall minimize the # of sys calls as well; on a syscall, the program switch from user-process to kernel-"process".)
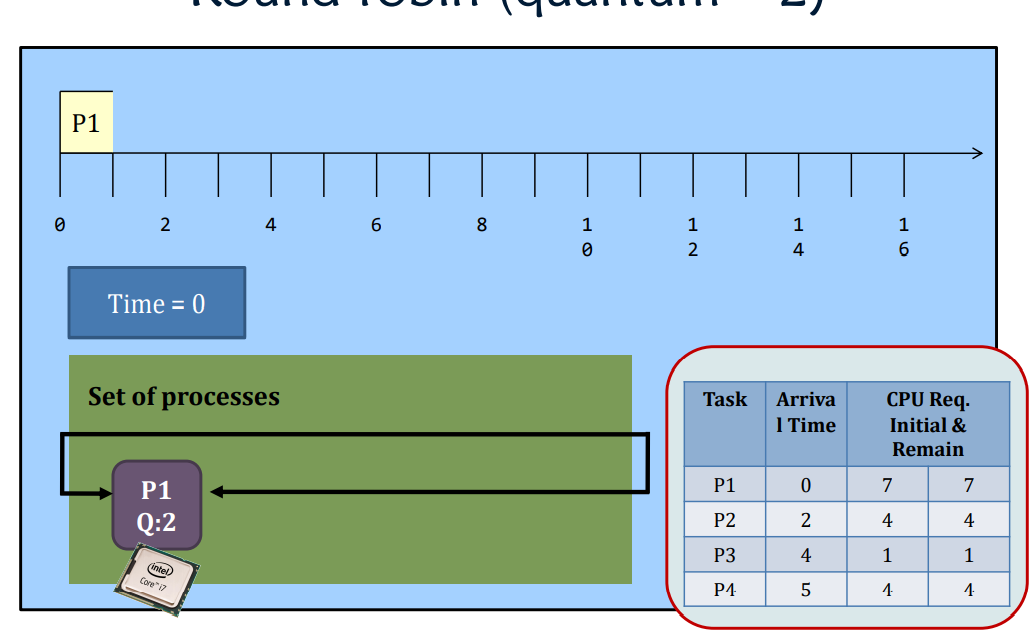
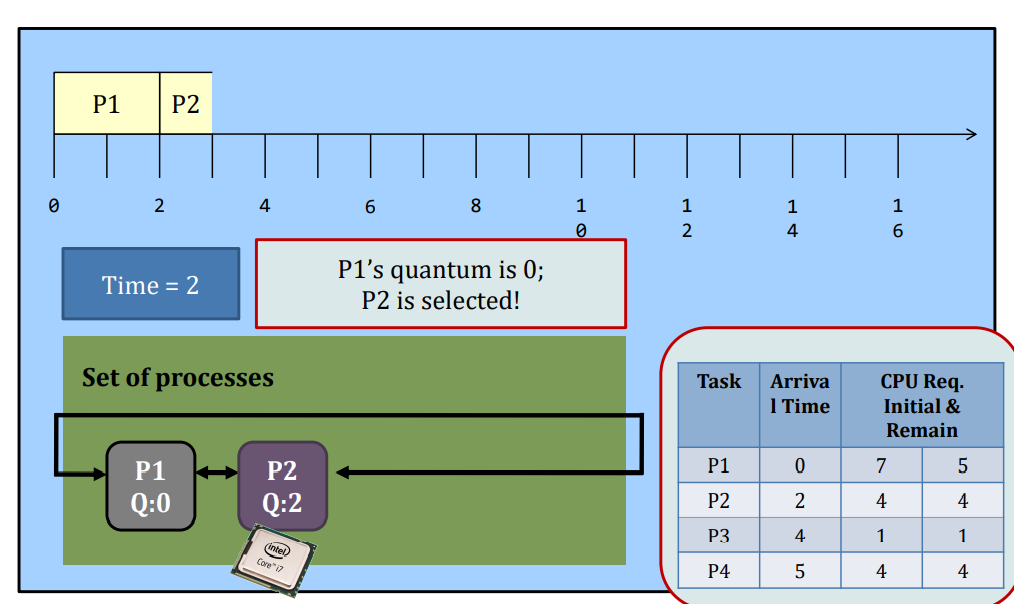
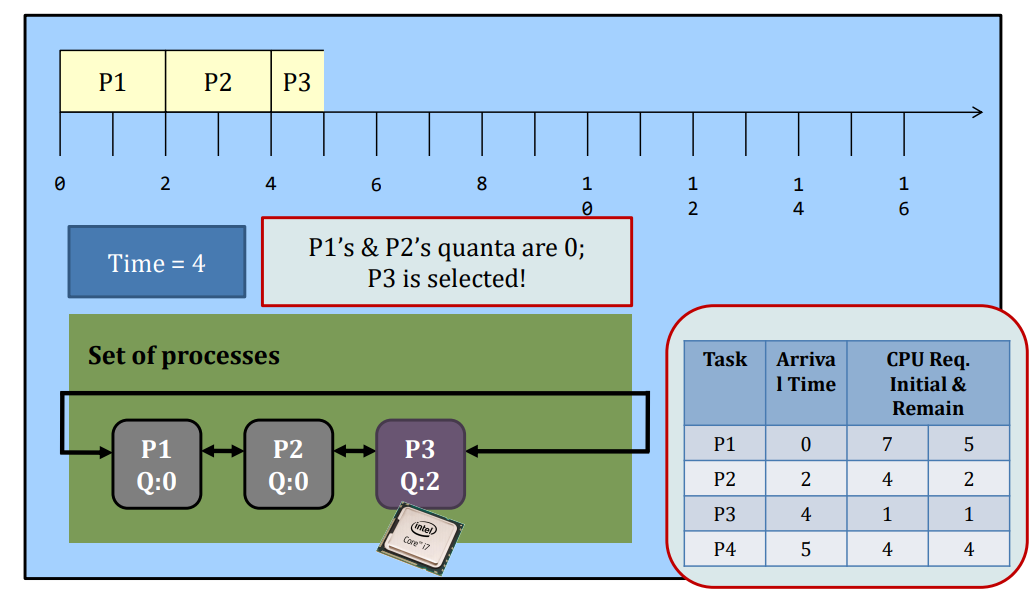
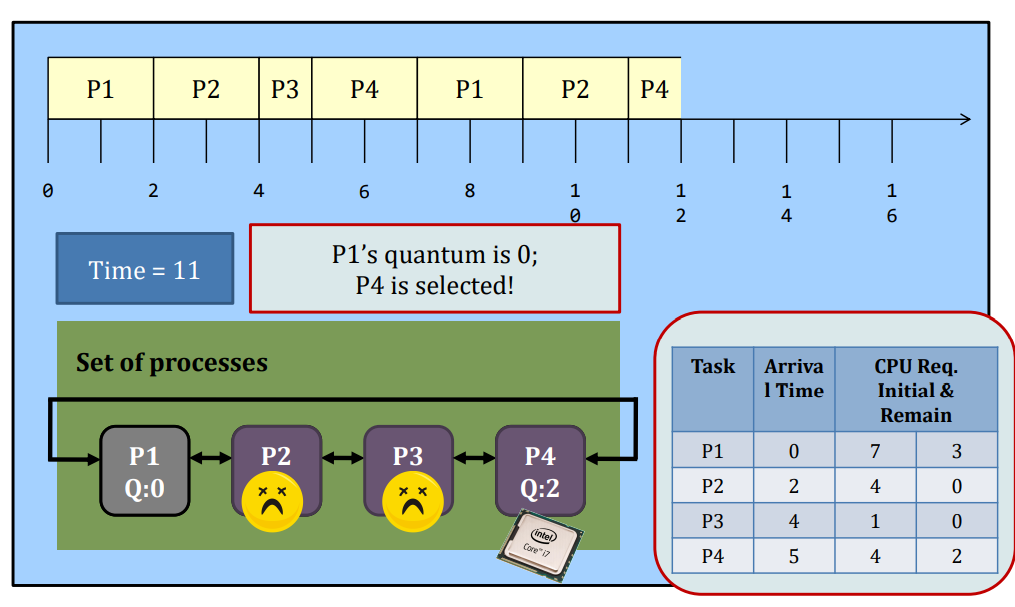
Round-robin
Round-Robin (RR) scheduling is preemptive.
- Every process is given a quantum, or the amount of time allowed to execute.
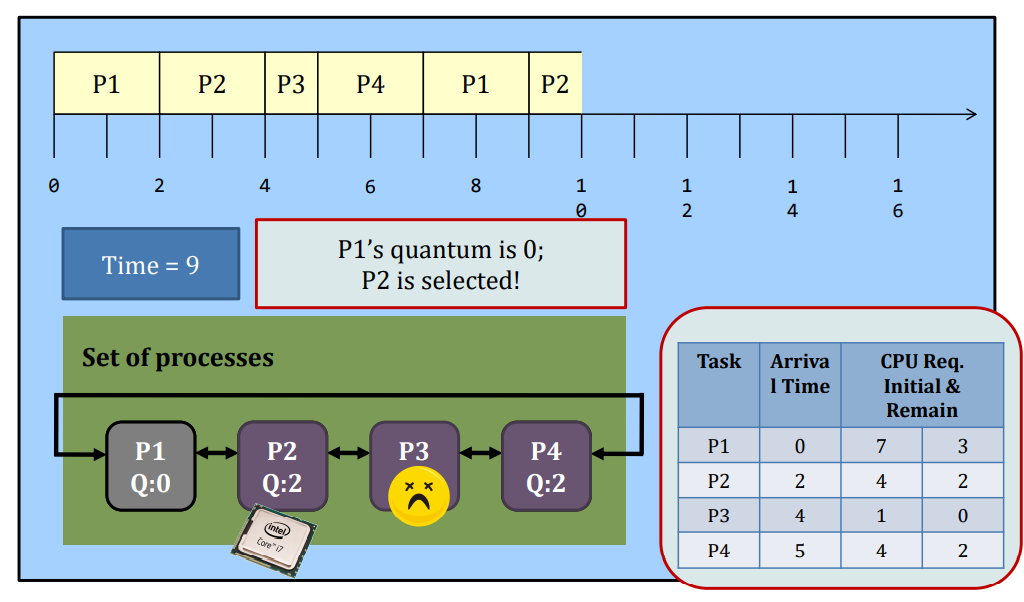
- Whenever the quantum of a process is used up (i.e., 0), the process releases the CPU and this is the preemption.
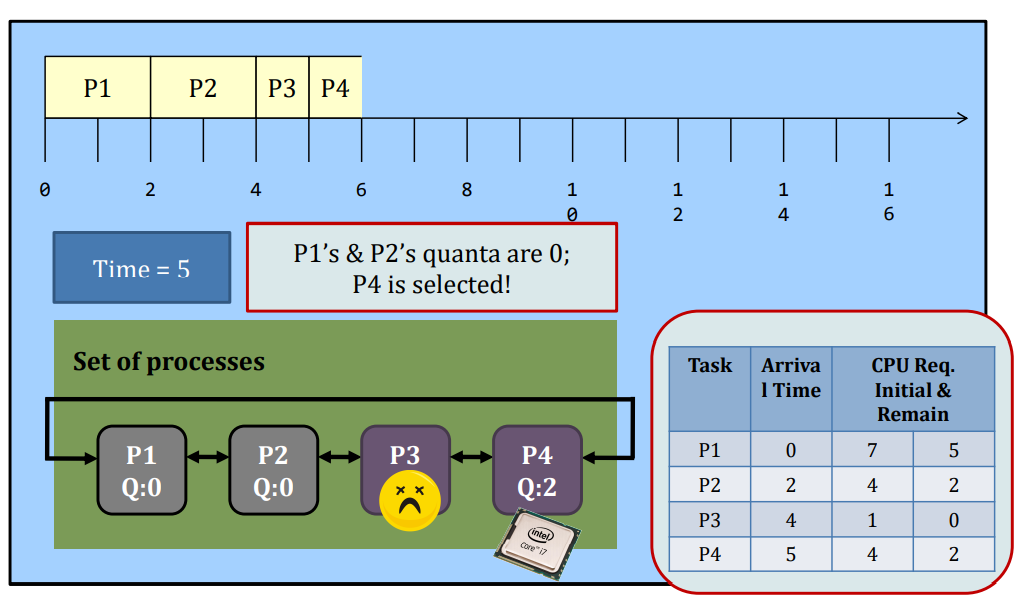
- Then, the scheduler steps in and it chooses the next process which has a non-zero quantum to run.
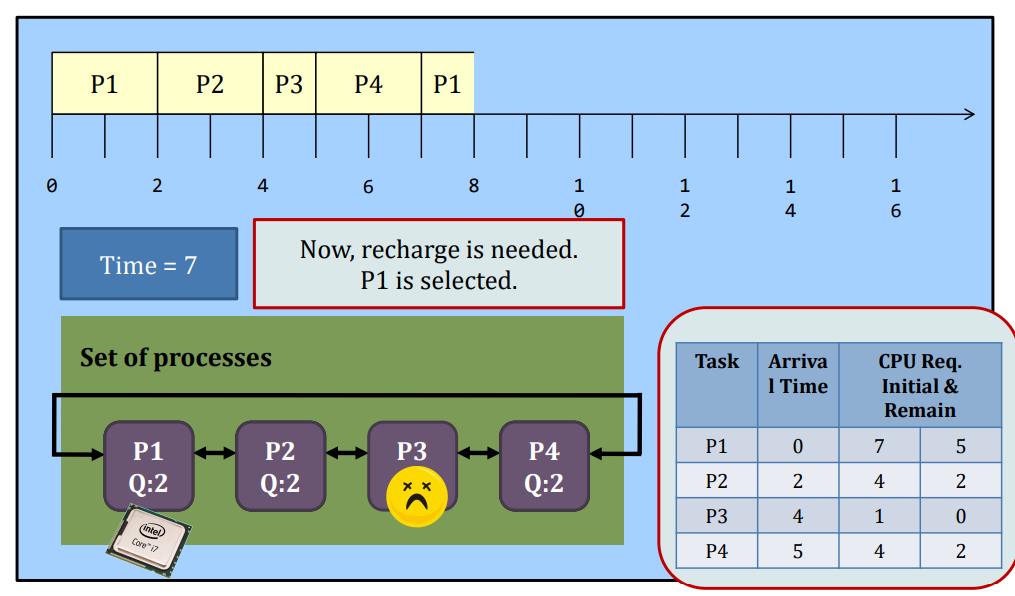
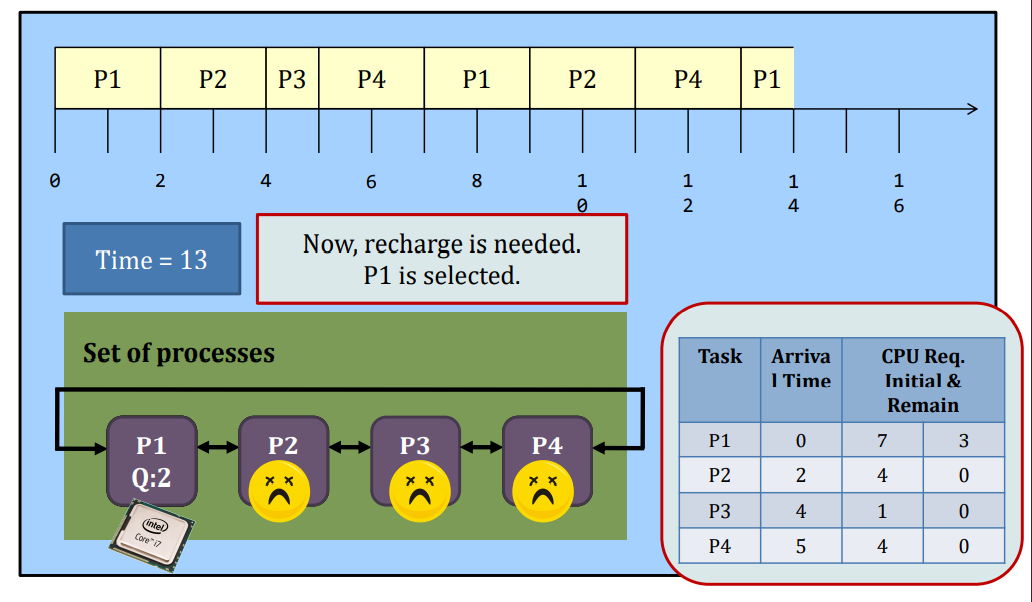
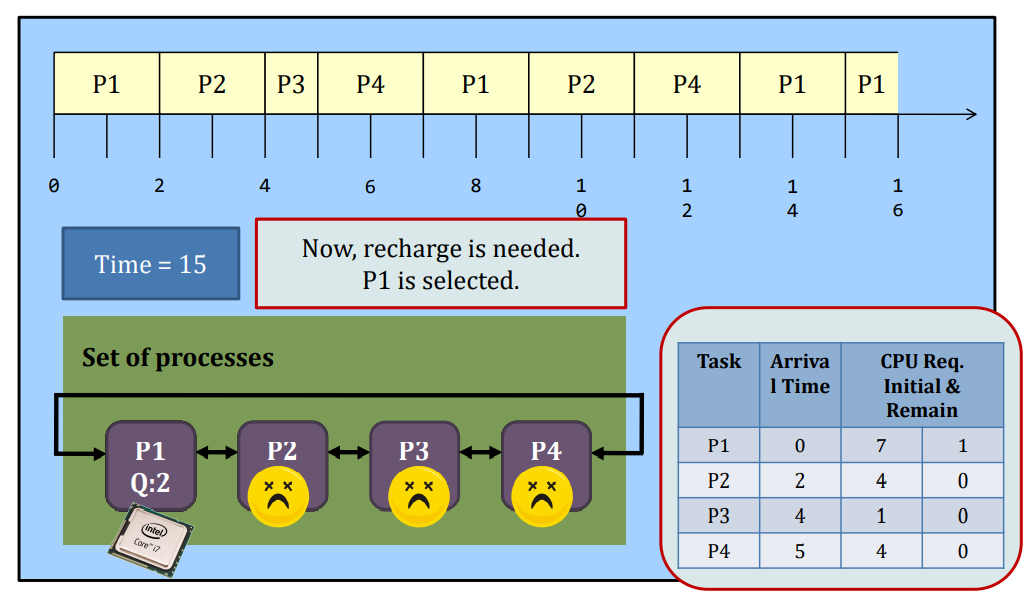
- If all processes in the system have used up the quantum, they will be re-charged to their initial values.
- Processes are therefore running one-by-one as a circular queue, for the basic version (i.e., no priority)
- New processes are added to the tail of the ready queue
- New process arrives won’t trigger a new selection decision
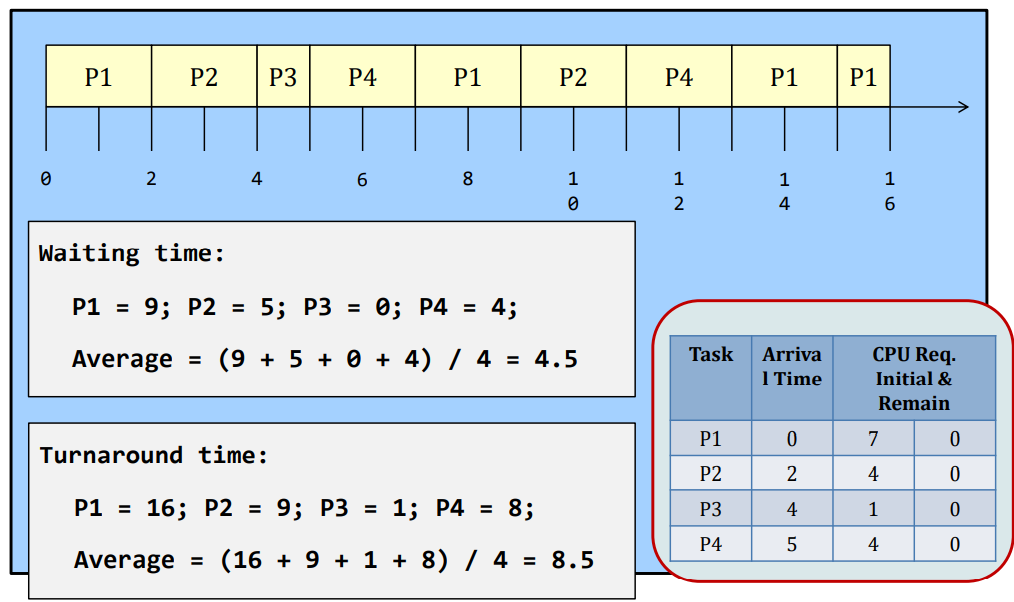
RR VS SJF
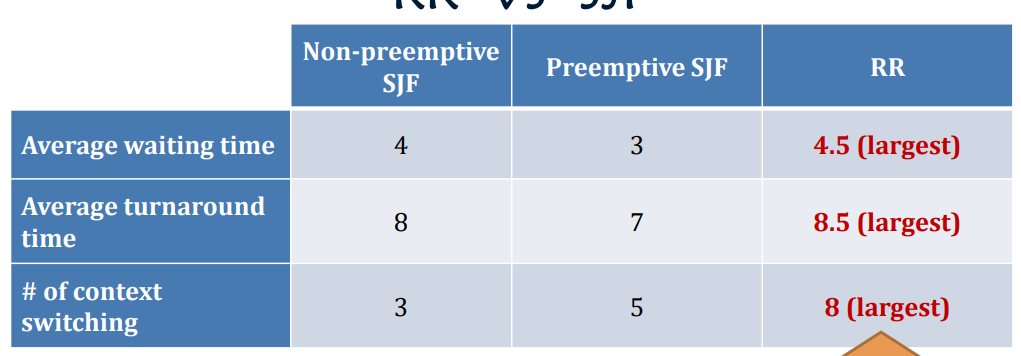
So, the RR algorithm gets all the bad! Why do we still need it?
The responsiveness of the processes is great under the RR algorithm. E.g., you won’t feel a job is “frozen” because every job gets the CPU from time to time!
Priority Scheduling
- A task is given a priority (and is usually an integer).
- A scheduler selects the next process based on the priority
- A higher priority process + RR = priority queue + new process arrival triggers a new selection
Static priority
- Every task is given a fixed priority.
- The priority is fixed throughout the life of the task.
Dynamic priority
- Every task is given an initial priority
- The priority is changing throughout the life of the task.
If a task is preempted in the middle
Note:
- it has been dequeued
- Re-enqueue back to the queue
- Quantum preserved / recharge?
- Depends
- Preserved: need more book keeping
- Recharge: easy (assumed in this course)
- Depends
Static priority scheduling – an example
Properties: process is assigned a fix priority when they are submitted to the system.
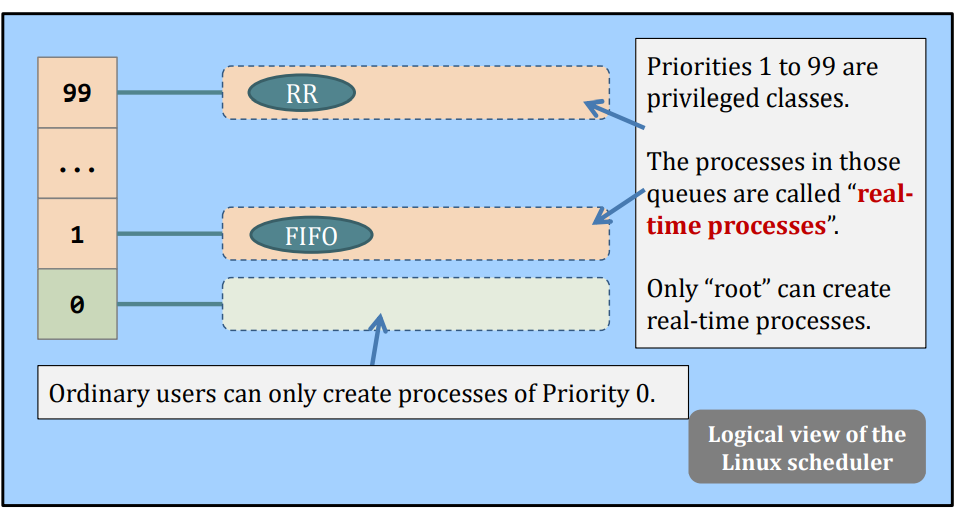
- E.g., Linux kernel 2.6 has 100 priority classes, [0-99].
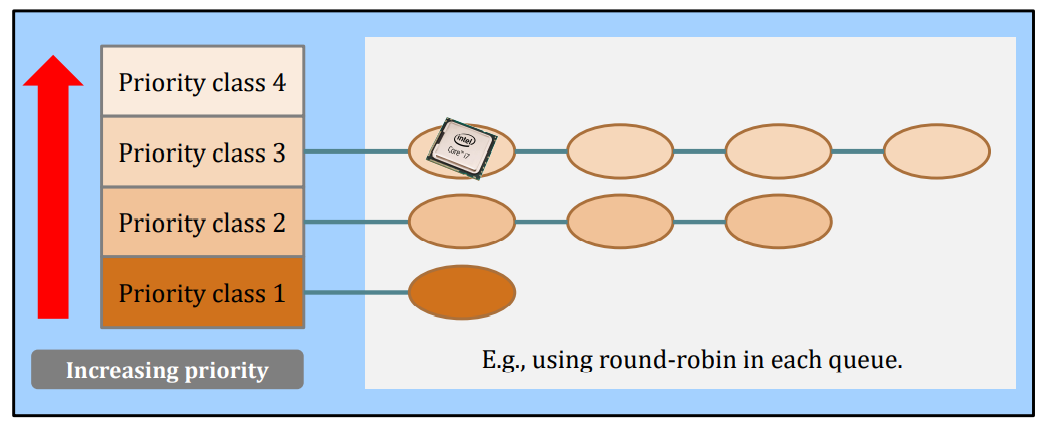
- The highest priority class will be selected.
- The tasks are usually short-lived, but important;
- To prevent high-priority tasks from running indefinitely
- The tasks are usually short-lived, but important;
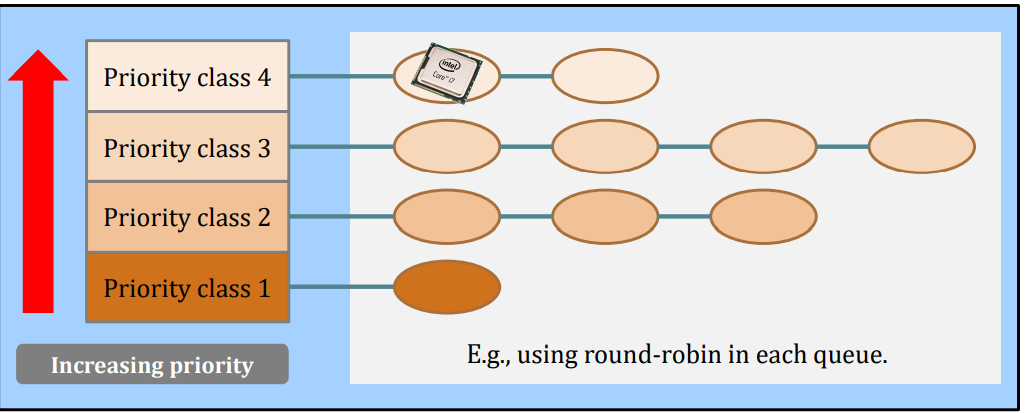
Lower priority classes will be scheduled only when the upper priority classes has no tasks.
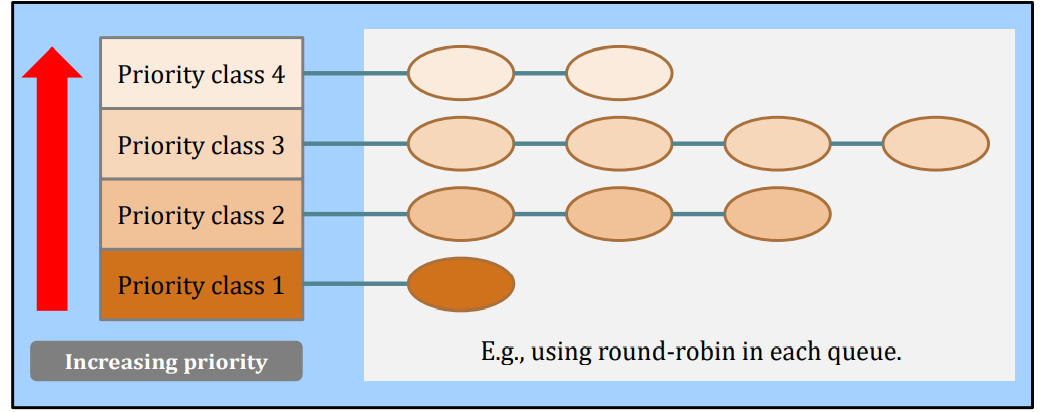
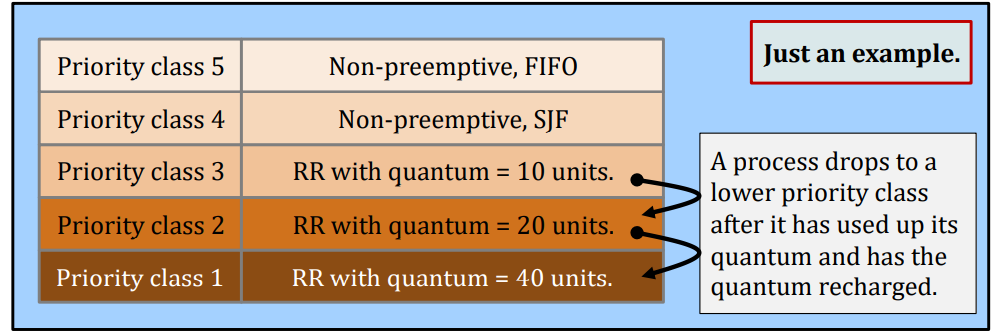
Multiple queue priority scheduling
Definitions
- It is still a priority scheduler.
- But, at each priority class, different schedulers may be deployed.
- The priority can be a mix of static and dynamic.
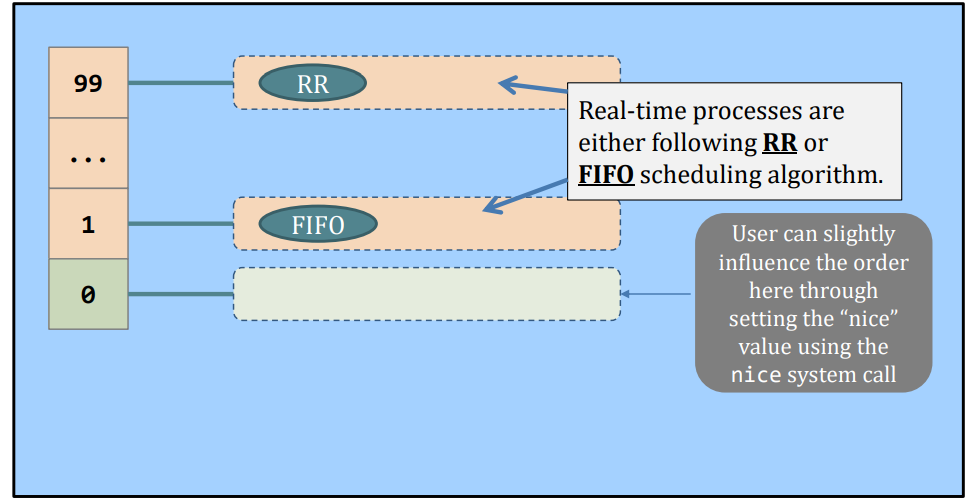
Real example, the Linux Scheduler.
- A multiple queue, (kind of) static priority scheduler
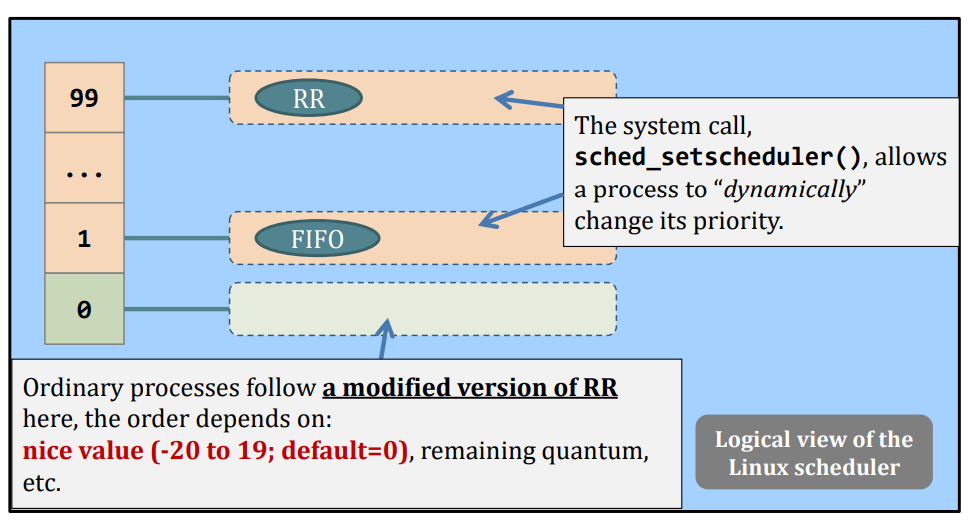
Do you notice that real (Linux) scheduler does not rely on task’s CPU (remaining) requirement values?
That is because in practice it’s very difficult to estimate how much CPU time a task needs – CPU is very complicated nowadays:
- Superscalar
- Out-of-order execution (OOE)
- Branch prediction
Recall: Four Fundamental OS Concepts
- Thread
- Single unique execution context: fully describes program state
- Program Counter, Registers, Execution Flags, Stack
- Address space (with translation)
- Programs execute in an address space that is distinct from the memory space of the physical machine
- Process
- An instance of an executing program is a process consisting of an address space and one or more threads of control
- Dual mode operation / Protection
- Only the "system" has the ability to access certain resources
- The OS and the hardware are protected from user programs and user programs are isolated from one another by controlling the translation from program virtual addresses to machine physical addresses.
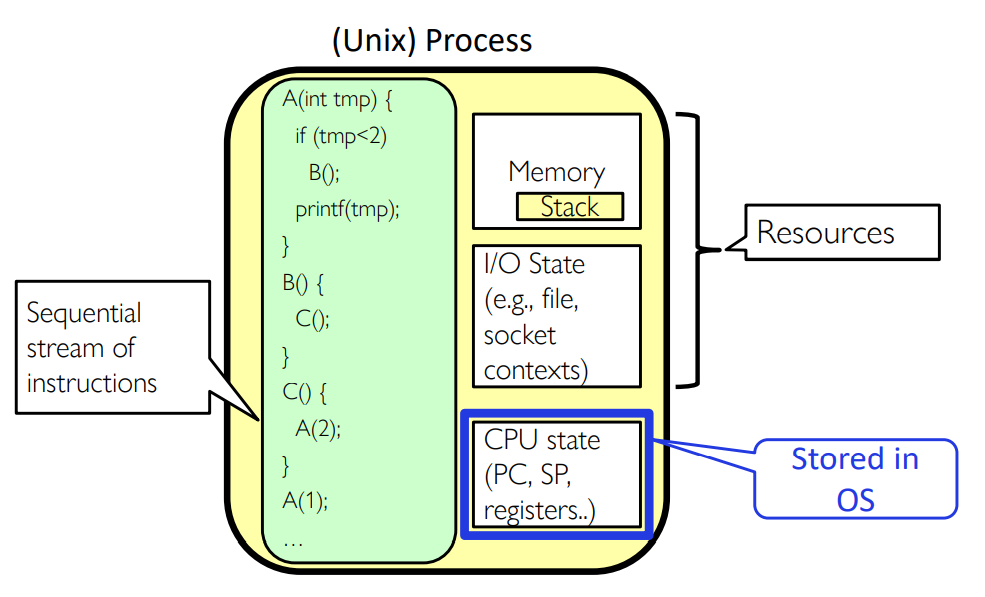
Recall: Process (What we knew so far)
- Process: An instance of an executing program
- An address space,
- One or more threads of control
Heavyweight process: a process has a single thread of control
- Two properties of heavyweight process
- Sequential program execution stream
- Active part
- Protected resource
- Passive part
- Sequential program execution stream
Modern Process with Threads
- Thread: a sequential execution stream within process (Sometimes called a "Lightweight process")
- Process still contains a single Address Space
- No protection between threads
- Multithreading: a single program made up of a number of different concurrent activities
- Sometimes called multitasking, as in Ada …
- Why separate the concept of a thread from that of a process?
- Discuss the “thread” part of a process (concurrency, parallelism)
- Separate from the “address space” (protection)
- Heavyweight Process Process with one thread
Single and Multithreaded Processes
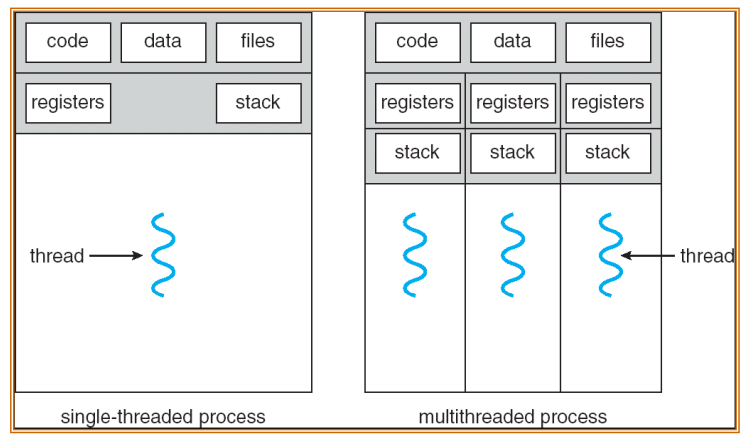
- Threads encapsulate concurrency: "Active" component
- Address spaces encapsulate protection: "Passive" part
- Keeps buggy program from trashing the system
Threads in a Process
- Threads are useful at user-level: parallelism, hide I/O latency, interactivity
- Option A (early Java): user-level library, one multi-threaded process
- Library does thread context switch
- Kernel time slices between processes, e.g., on system call I/O
- Option B (SunOS, Linux/Unix variants): many single-threaded processes
- Option C (Windows): scheduler activations
- Kernel allocates processes to user-level library
- Thread library implements context switch
- System call I/O that blocks triggers up-call(向上调用)
- Option D (Linux, MacOS, Windows): use kernel thread
- System calls for thread fork, join, exit (and lock, unlock,…)
- Kernel does context switching
- Simple, but a lot of transitions between user and kernel mode
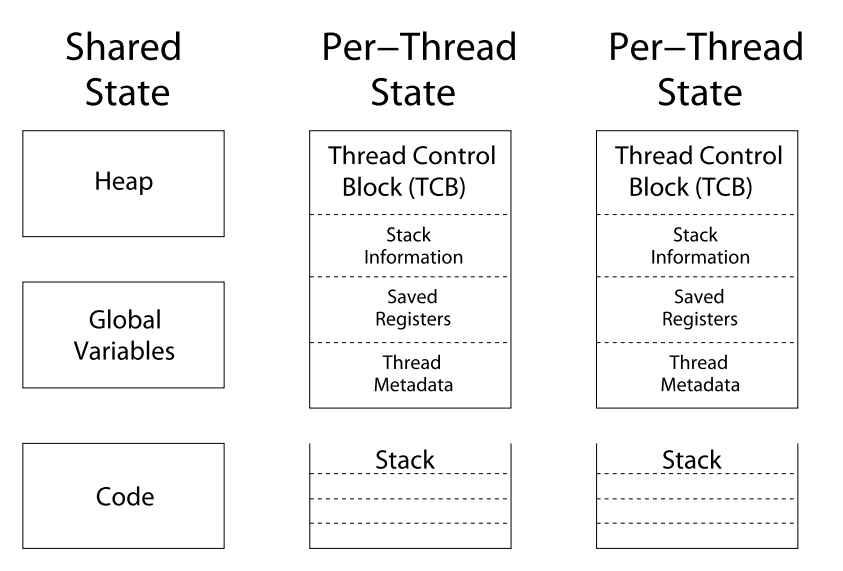
Thread State
- State shared by all threads in process/address space
- Content of memory (global variables, heap)
- I/O state (file descriptors, network connections, etc)
- State "private" to each thread
- Kept in TCB = Thread Control Block
- CPU registers (including, program counter)
- Execution stack – what is this?
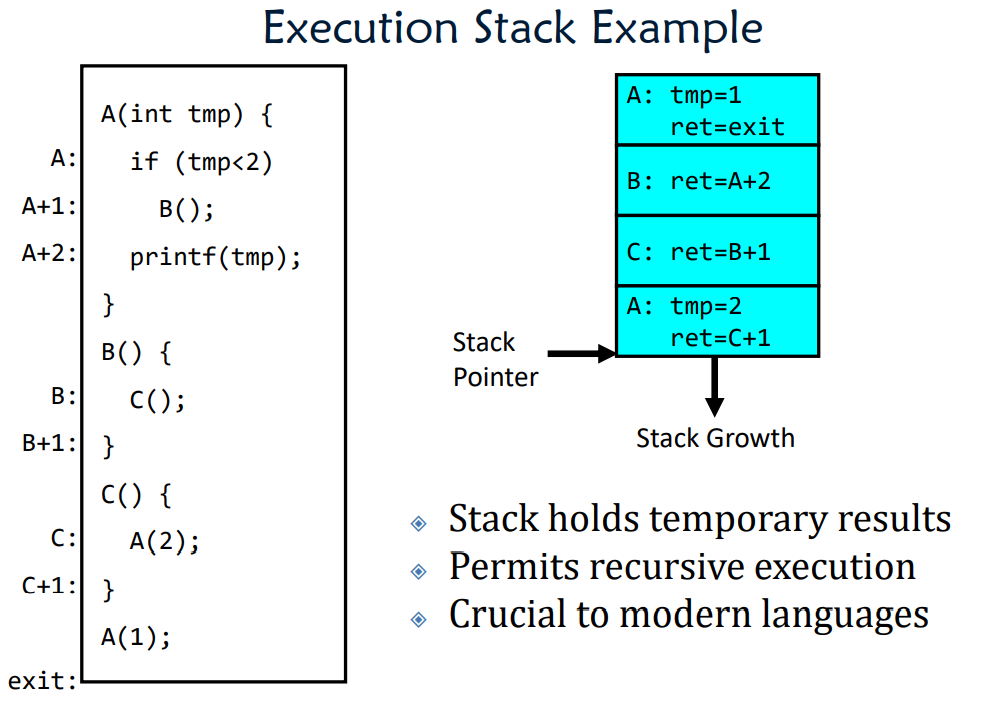
- Execution Stack
- Parameters, temporary variable
- Return PCs are kept while called procedures are executing
Shared vs. Per-Thread State
Execution Stack Example
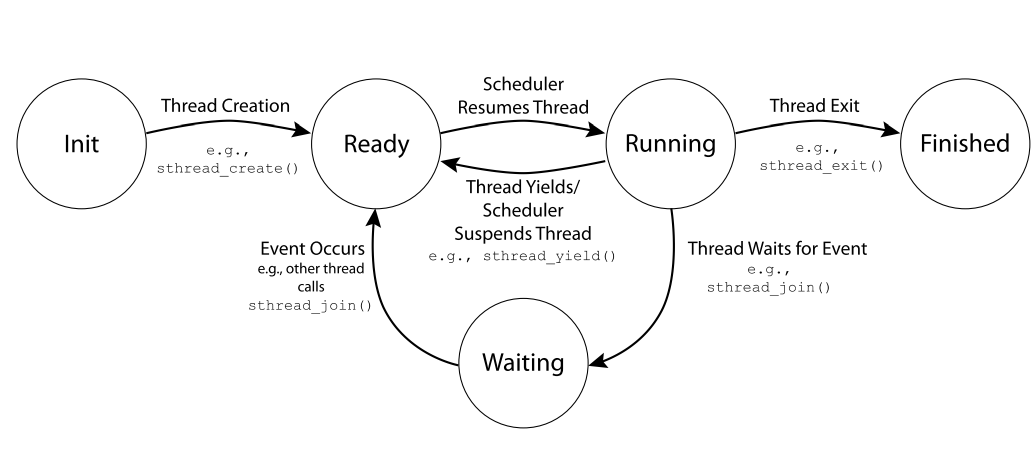
Thread Lifecycle
Multithreaded Processes
- Multithreaded Processes
- Thread Control Blocks (TCBs):
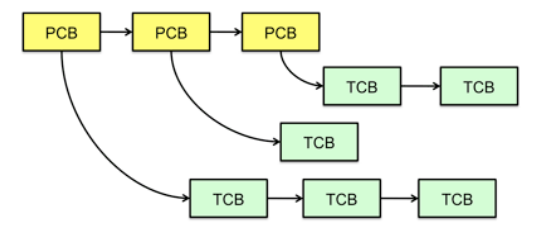
- Switching threads within a block is a simple thread switch
- Switching threads across blocks requires changes to memory and I/O address tables
Putting it Together: Process
Putting it Together: Processes
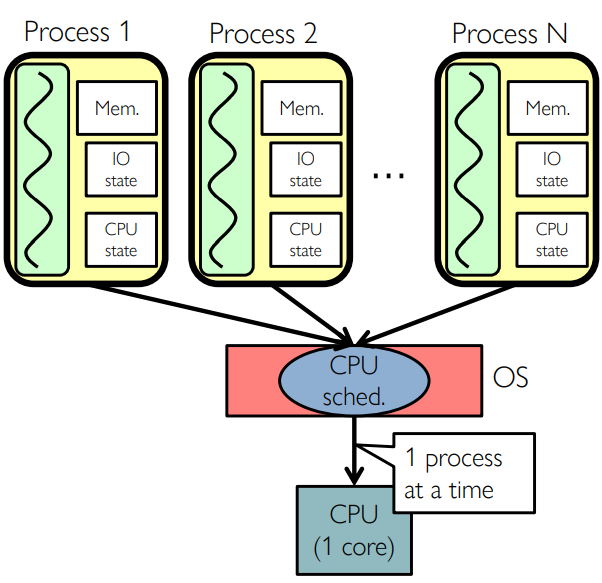
- Switch overhead: high
- CPU state: low
- Memory/IO state: high
- Process creation: high
- Protection
- CPU: yes
- Memory/IO: yes
- Sharing overhead: high (involves at least a context switch)
Putting it Together: Threads
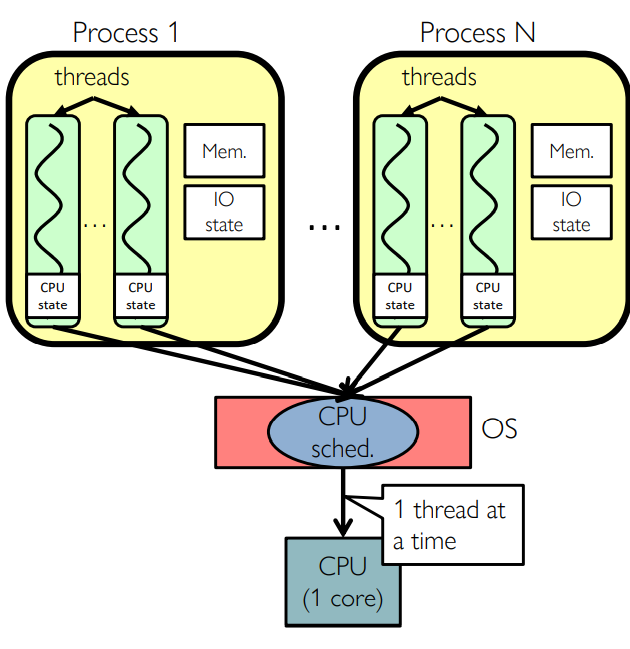
- Switch overhead: low (as only CPU state)
- Thread creation: low
- Protection
- CPU: yes
- Memory/IO: no
- Sharing overhead: low(thread switch overhead low)
Putting it Together: Multi-Cores
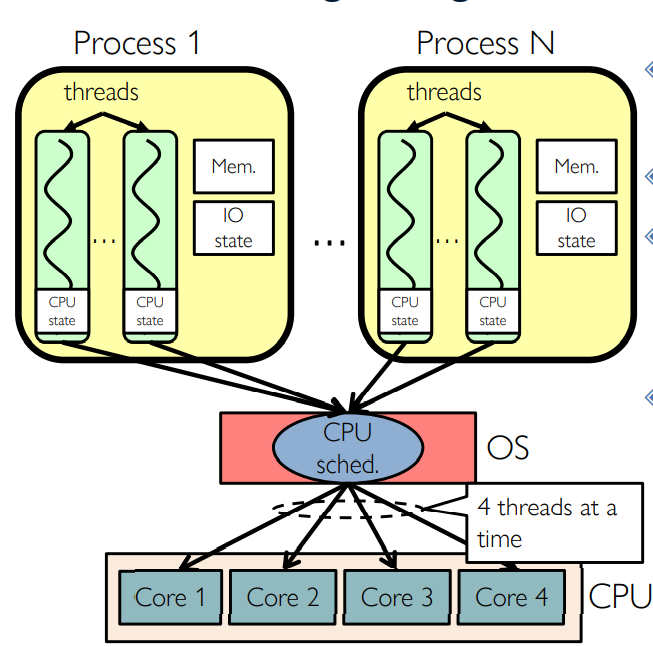
- Switch overhead: low (only CPU state)
- Thread creation: low
- Protection
- CPU: yes
- Memory/IO: No
- Sharing overhead:
- low (thread switch overhead low, may not need to switch CPU at all!)
Simultaneous MultiThreading/Hyperthreading
- Hardware technique
- Superscalar processors can execute multiple instructions that are independent
- Hyperthreading duplicates register state to make a second “thread,” allowing more instructions to run
- Can schedule each thread as if were separate CPU
- But, sub-linear speedup!
- Original called "Simultaneous Multithreading"
- http://www.cs.washington.edu/research/smt/index.html
- Intel, SPARC, Power (IBM)
- A virtual core on AWS’ EC2 is basically a hyperthread
Putting it Together: Hyper-Threading
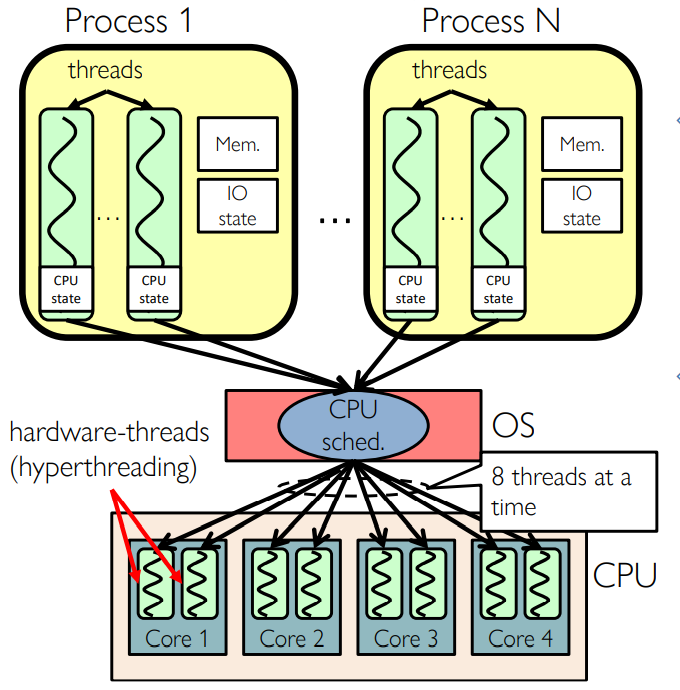
- Switch overhead between
- hardware-threads: very-low (done in hardware)
- Contention for ALUs/FPUs may hurt performance
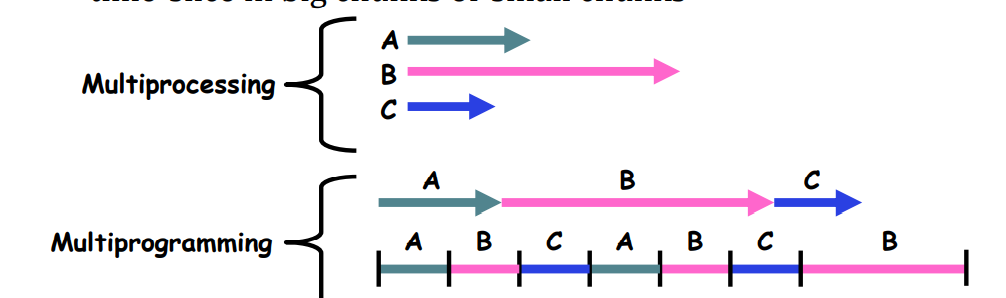
Multiprocessing vs Multiprogramming
- Remember Definitions:
- Multiprocessing \(\equiv\) Multiple CPUs
- Multiprogramming \(\equiv\) Multiple Jobs or Processes
- Multithreading \(\equiv\) Multiple threads per Process
- What does it mean to run two threads “concurrently”?
- Scheduler is free to run threads in any order and interleaving: FIFO, Random, …
- Dispatcher(调度器) can choose to run each thread to completion or time-slice in big chunks or small chunks